




SKU: 000138
Controla motores DC de alta corriente con este poderoso driver


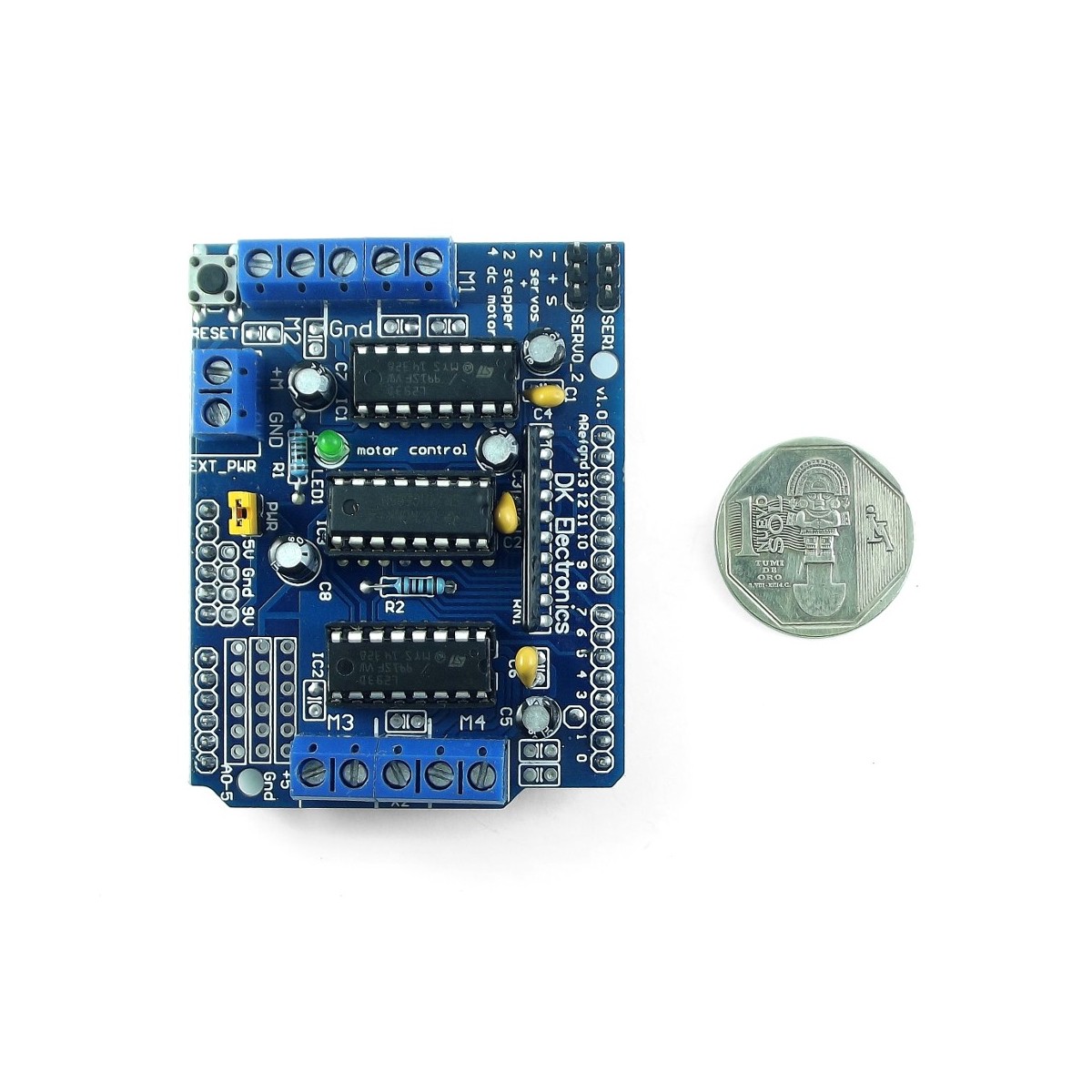
Controla 4 motores DC o 2 motores PaP y además 2 servomotores con la ayuda de este Shield. Podrás controlar tanto la velocidad como la dirección de giro. Ideal para proyectos de robótica móvil.
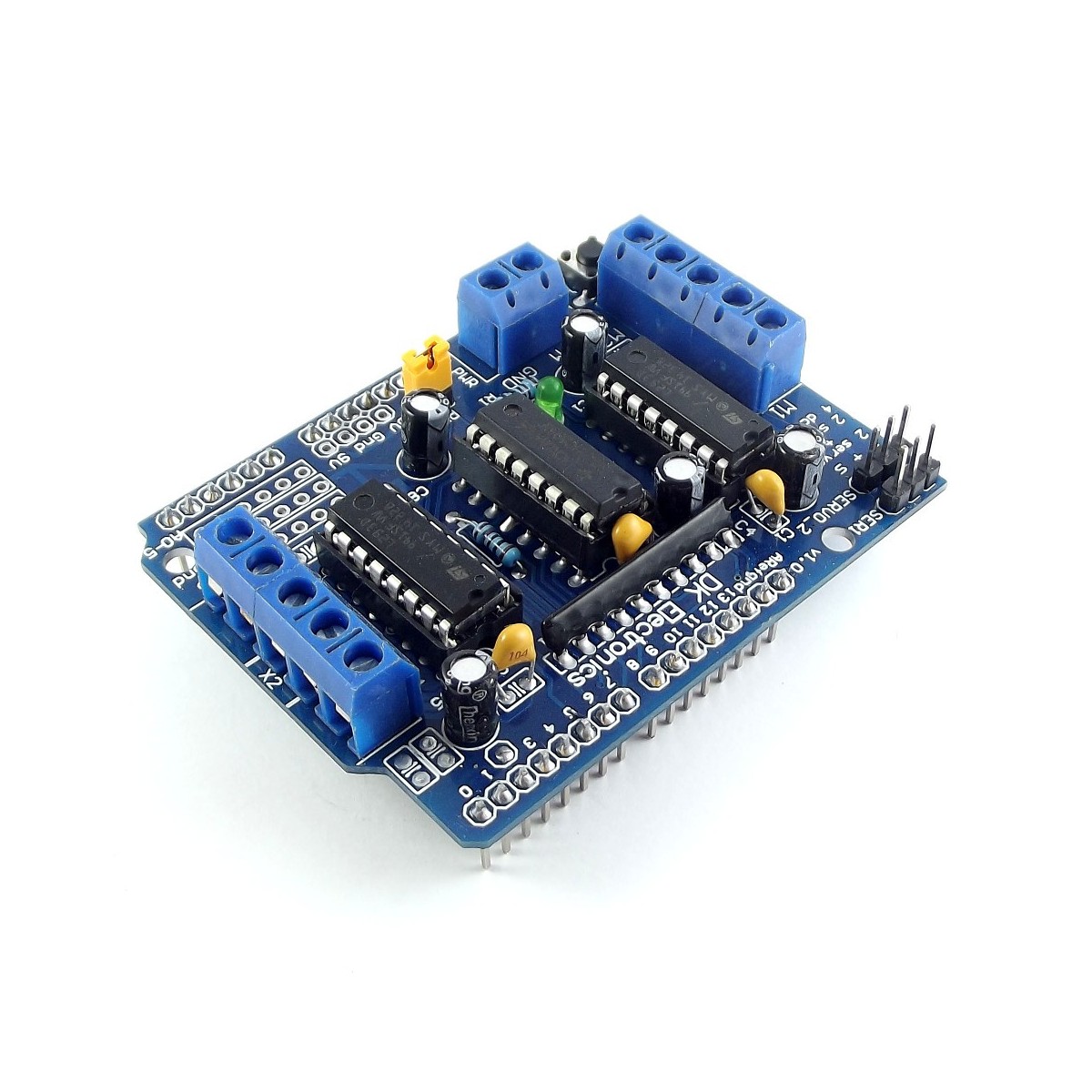
El Shield Motor Driver L293D fue diseñado por Adafruit para facilitar el control de motores con Arduino. El shield facilita el control de hasta 4 motores DC o 2 motores paso a paso unipolares o bipolares y 2 servomotores pequeños (SG90 o MG90). Posee dos drivers puente H L293D manejados por un Chip conversor serial a paralelo 74HC595, reduciendo notablemente el uso de pines de Arduino. El Shield es compatible con Arduino Uno, Mega y Leonardo.
El conversor 74HC595 expande 4 pines (4,7,8,12) de Arduino a 8 pines necesarios para manejar la dirección de los drivers L293D. Las señales "Enable" de los drivers están conectadas directamente a pines PWM de Arduino (3,5,6,11), permitiendo controlar la velocidad de los motores.
El Shield motor L293D soporta:
Las salidas para los servos toman su alimentación directamente de los 5V de la placa Arduino, por lo que esta bien utilizar servos pequeños como los SG90 o MG90S. Si necesita utilizar servos con un mayor consumo de corriente, se recomienda cortar la pista de cobre de alimentación V+ en el shield o el cable positivo del servo y alimentar por separado (No olvidar conectar las tierras).
La alimentación de las 4 salidas para motores u otras cargas inductivas M1, M2, M3 y M4 se tiene que suministrar con una fuente externa. Se puede proveer del jack DC del Arduino (Pin Vin) o del conector de tornillo "EXT_PWR" en la shield; seleccionable mediante el jumper "PWR" (Si el jumper está colocado se utiliza fuente externa del Arduino conectada al jack DC, y si no está colocado se utiliza el conector de tornillo de la shield). Si utiliza el jumper y selecciona la fuente externa tenga en cuenta la polaridad, ya que esta entrada no cuenta con diodo de protección de polaridad y una conexión incorrecta resultará en el daño del shield y la placa Arduino. Tampoco conectar la salida regulada de 5V ó 3.3V de la placa Arduino a esta entrada.
En cualquier caso la corriente de la fuente externa de voltaje debe ser superior al consumo máximo de las cargas (motores), se recomienda una fuente de 7-9V con capacidad de entregar 2 amperios mínimo.
Se pueden controlar motores de 4.5 V a 25 V. Si provee alimentación con fuente externa conectada a la placa Arduino. El voltaje máximo recomendado que admite esta entrada en Arduino Uno por ej. debe ir de 6 V a 12 V, por lo que podrá controlar motores solo de 4.5 V hasta 10 V aprox. según el voltaje de la fuente.
Gran selección de productos para fabricación digital aditiva, desarrolla tu creatividad
Por favor, regístrese primero.
RegistrarseCrear una cuenta gratuita para usar listas de deseos.
Registrarse