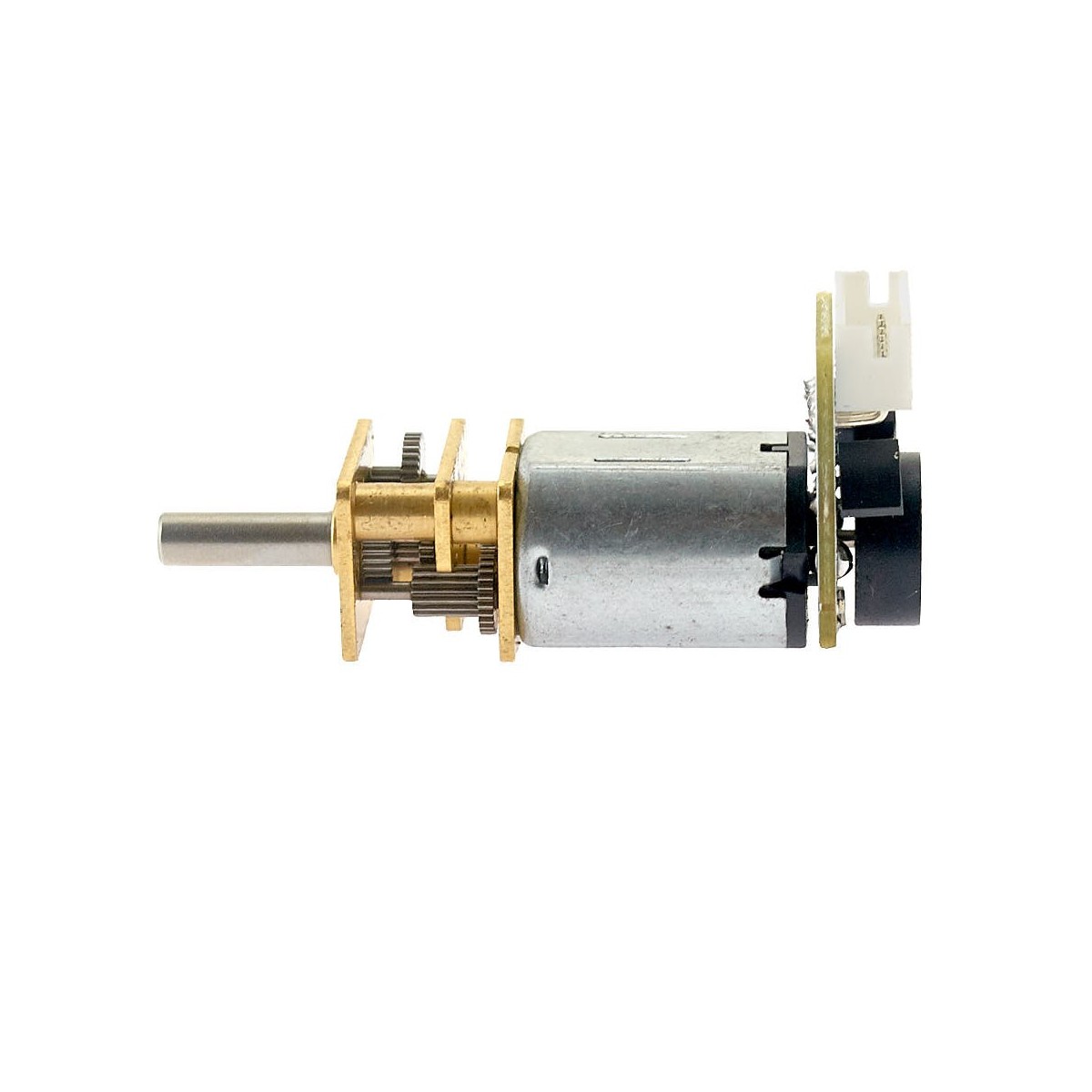
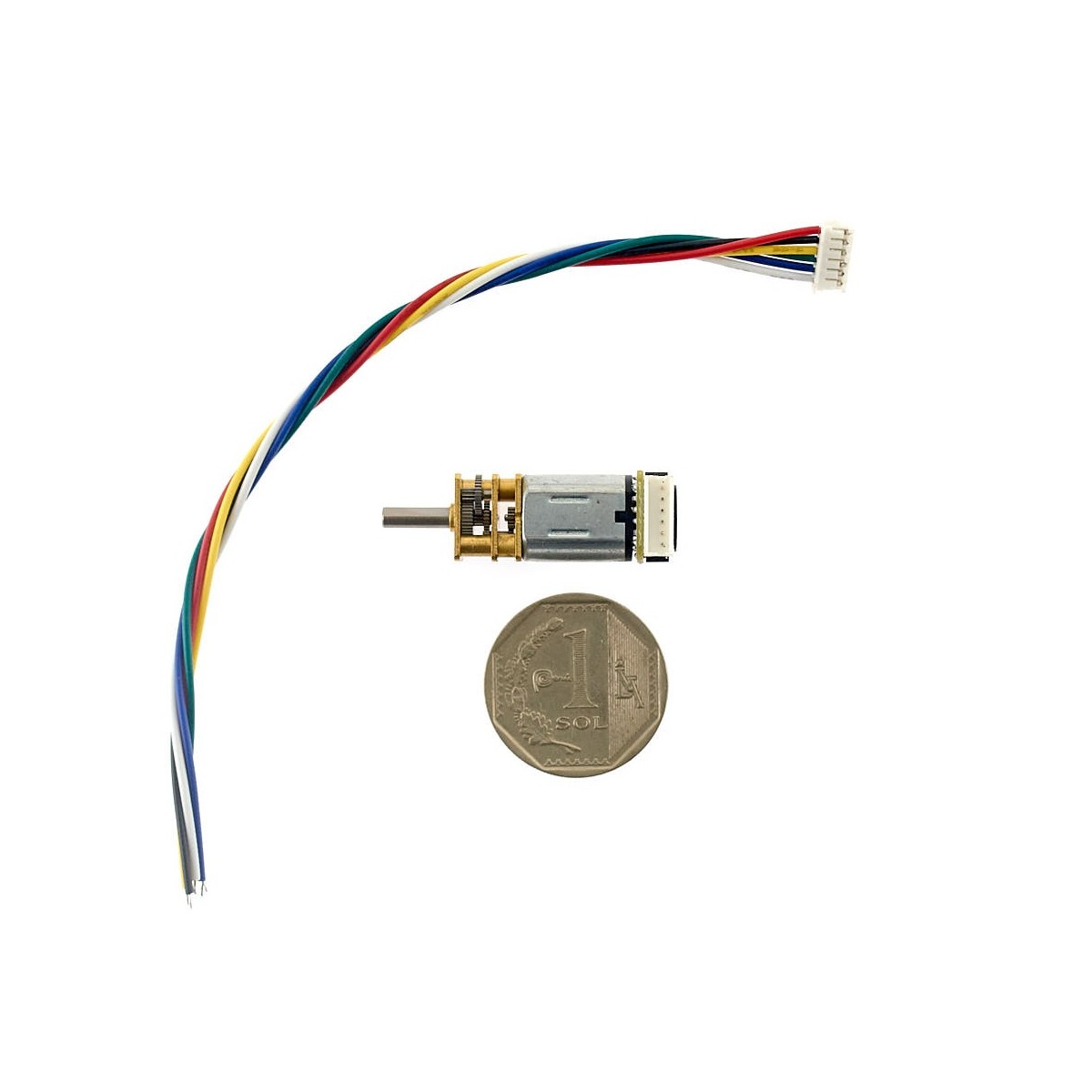
El Motor DC con encoder y caja reductora N20 - 12V 1000RPM es ideal para proyectos de control de velocidad o posición en lazo cerrado, como: péndulo invertido, robot móvil autónomo, servomotor DC, faja transportadora y más. El dispositivo está compuesto de tres partes: el motor DC, la caja reductora y el encoder de cuadratura. El motor DC trabaja a un voltaje nominal de 12V. La caja reductora de metal cumple la función de reducir la velocidad de entrada y aumentar el torque de salida. El motor y la caja reductora están fabricados en metal para una mayor durabilidad y resistencia. El encoder sirve como un sensor de velocidad y sentido de giro, funciona utilizando dos sensores de efecto Hall.
El motor DC funciona con un voltaje máximo de 12V, el torque y velocidad de salida varían de acuerdo al voltaje aplicado. Al trabajar con el voltaje nominal de 12V, la velocidad angular de salida será de 100RPM (revoluciones por minuto). Para trabajar con un microcontrolador como Arduino, PIC, Teensy, Nodemcu o Raspberry Pi necesitaremos utilizar un driver de potencia y una fuente de alimentación externa. Para el Driver podemos optar por un puente H como el Driver L298N, el Driver L293D, el Driver VNH2SP30, o el Driver BTS7960, lo que nos permitirá controlar el sentido de giro y la velocidad mediante PWM. En el caso que solo sea necesario hacer girar el motor en un sentido podemos utilizar un Driver Mosfet 30A que también nos permite regular la velocidad por PWM. Para la fuente de alimentación se recomienda utilizar una fuente o batería con la capacidad de entregar por lo menos 1 amperio de forma constante. No recomendamos utilizar la salida de 5V de nuestro Arduino, ni tampoco alimentar el motor con el puerto USB de la PC.
El encoder está conformado por un disco magnético multipolo unido al eje del motor DC y por dos sensores de efecto Hall. Cuando el motor DC gira, el disco magnético también gira y los polos magnéticos del disco van pasando frente a los sensores hall que emiten un pulso digital ("tick") cada vez que detectan un polo magnético positivo. Como el disco posee 14 polos alternados, entonces por cada vuelta cada sensor hall emitirá 7 pulsos o "ticks". Los dos sensores hall (A y B) están desfasados 90º y sus salidas tipo onda cuadrada también estarán desfasadas 90º, a esto se le conoce como encoder de cuadratura. El desfase de ondas es útil para detectar el sentido de giro del motor, pues al girar en un sentido la onda A precederá a la onda B y en el otro sentido de gira la onda B precederá a la A. Para trabajar con Arduino Uno o Nano se deben utilizar los pines 2 y 3, que son los correspondientes a las interrupciones externas, para otros modelos de Arduino debemos revisar cuales son los pines adecuados.
Diseñado especialmente para robótica de competición, especialmente para robots seguidores de líneas y velocistas.