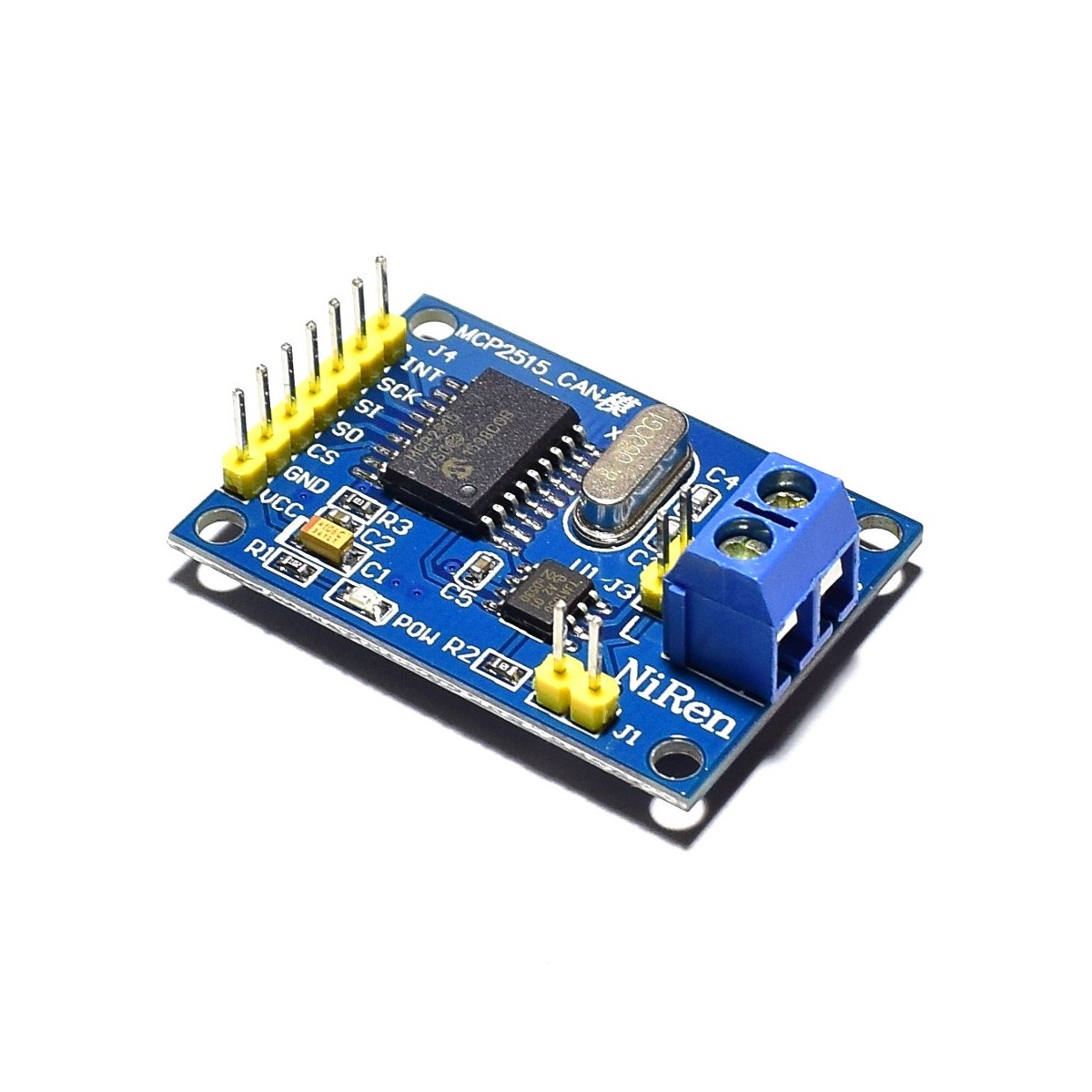
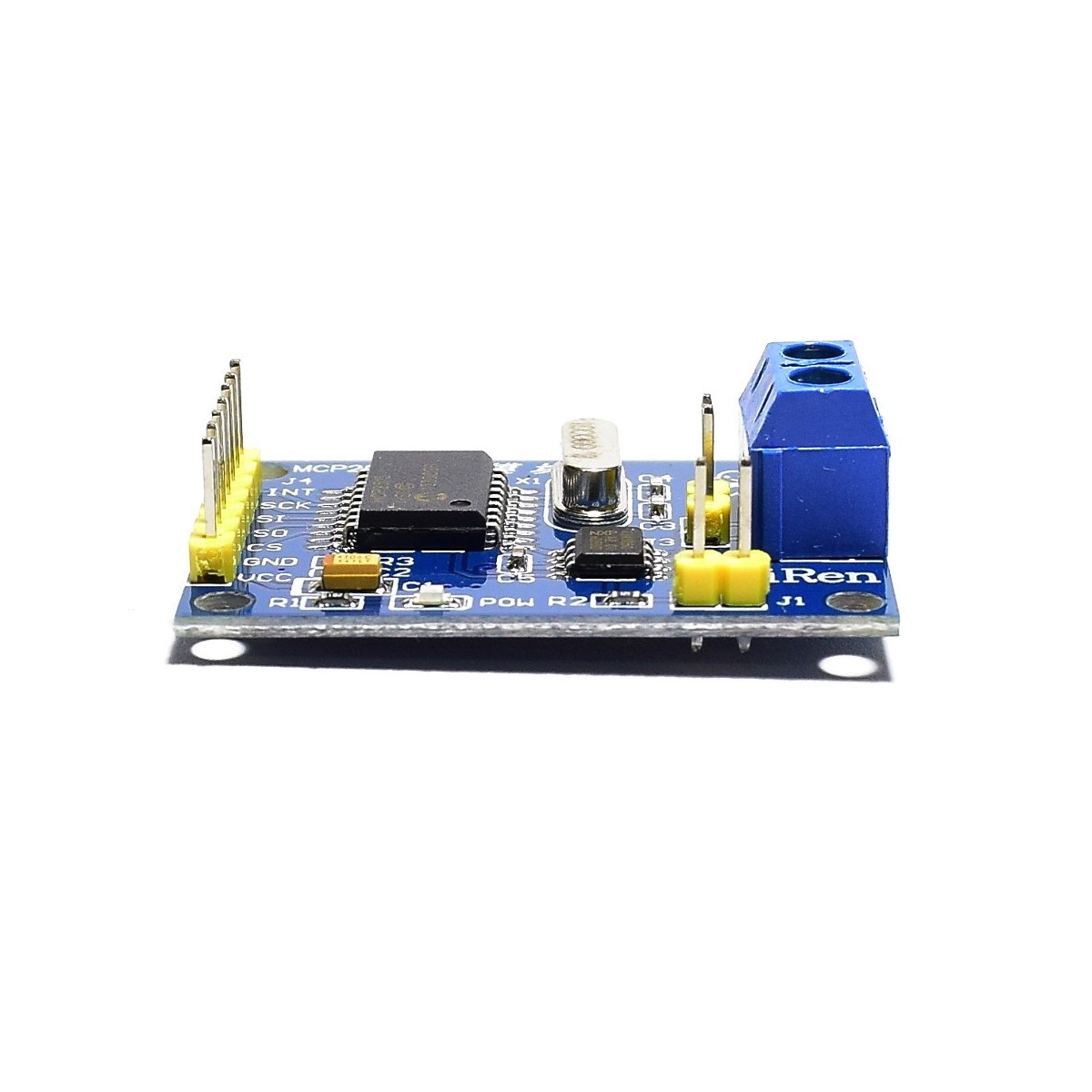
El módulo CAN MCP2515 permite comunicar tus proyectos basados en Arduino con tu automóvil mediante el protocolo CAN. CAN (siglas del inglés Controller Area Network) es un protocolo de comunicaciones desarrollado por la empresa alemana Robert Bosch GmbH, basado en una topología bus para la transmisión de mensajes en entornos distribuidos. El bus CAN es ideal para aplicaciones de autotrónica, mecatrónica automotriz, automatización industrial, domótica y más.
El módulo permite recibir y enviar frames de datos en formato estándar y extendido. El controlador CAN posee mascaras y filtros de acceso, reduciendo asi la carga del microcontrolador principal. Incluye el chip controlador CAN MCP2515 con interfaz SPI y el chip transceiver CAN TJA1050 con el fin de facilitar la comunicación con microcontroladores y tarjetas de desarrollo. Permite implementar una red de microcontroladores con la topología bus (ahorrando cable) con una longitud de hasta 1200 metros. El cable puede ser tipo par trenzado UTP Cat5/Cat6, cada terminación de nodo debe tener una resistencia de 120 Ohms.