En este tutorial construiremos un robot móvil controlado por Bluetooth desde nuestro celular o smartphone a través de un aplicativo Android.
1. Materiales:
Empecemos describiendo los principales materiales:
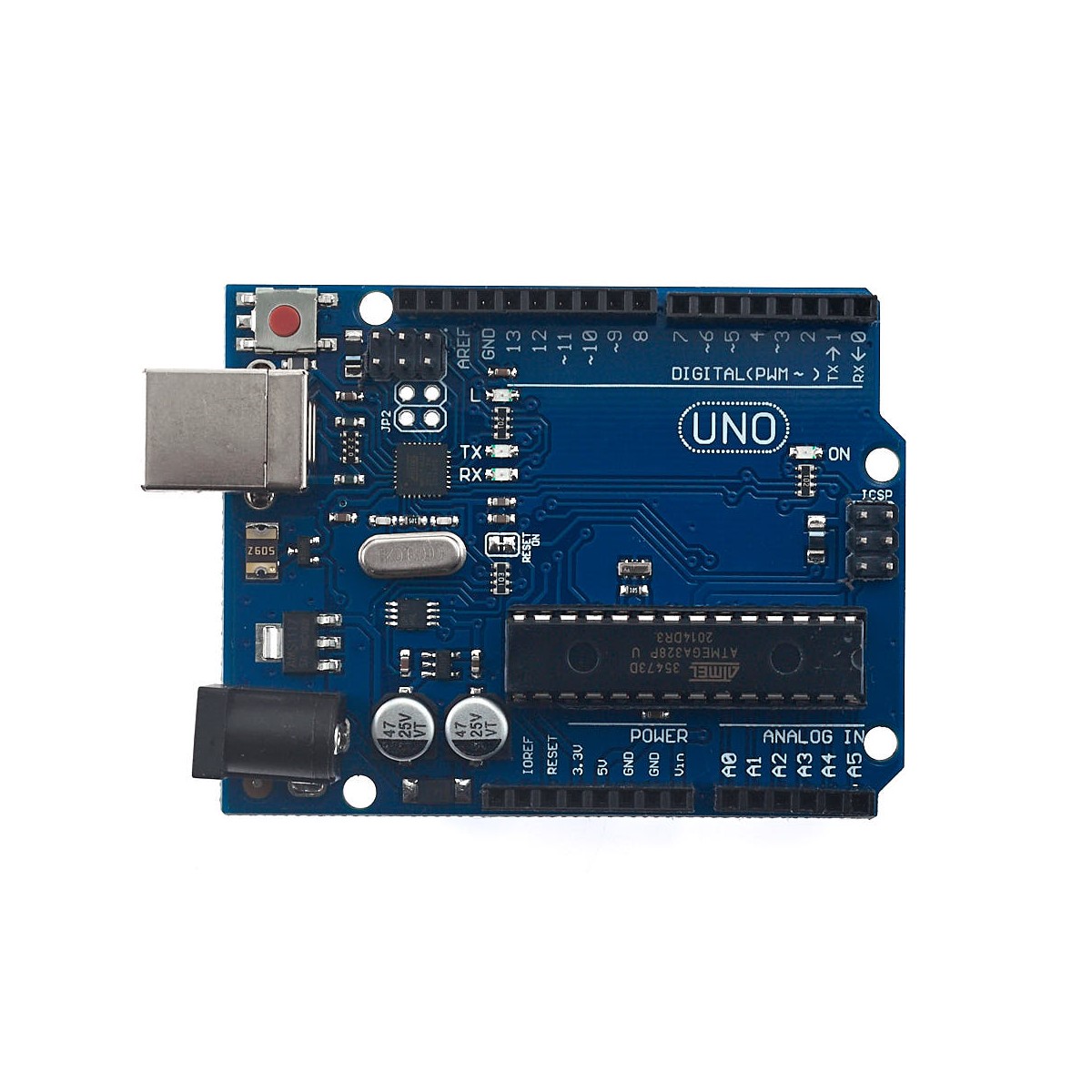
Arduino
Podemos usar cualquiera de las placas Arduino, nosotros usaremos el Arduino Uno R3 por ser uno de los más usados.
Módulo Bluetooth HC-06 o HC-05
El módulo Bluetooth nos sirve para que nuestro Arduino y el celular puedan comunicarse a través de Bluetooth. Para esta aplicación podemos usar cualquiera de los dos módulos pues los trabajaremos en modo esclavo.
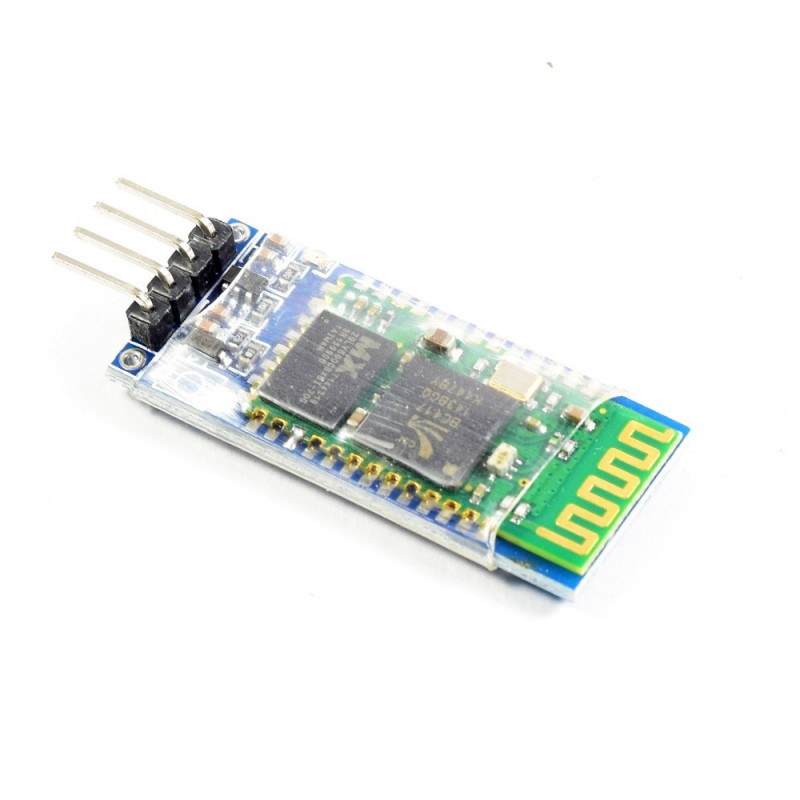
Si usan un HC-06 estaría listo para usar, si usan un HC-05 deben verificar que esté configurado como esclavo. La velocidad con la que vamos a trabajar es a 9600baudios, que es la velocidad que viene por defecto tanto en el HC-06 como en el HC-05.
Nosotros usaremos el HC-06 con su configuración por defecto, si desean realizar configuraciones adicionales puede consultar nuestros tutoriales:
1. Configuración del módulo Bluetooth HC-06 usando comandos AT
2. Configuración del módulo Bluetooth HC-05 usando comandos AT
Driver Puente H
El puente H es el que nos permite invertir el giro de un motor, necesitamos un puente H que tenga dos canales para poder controlar dos motores.
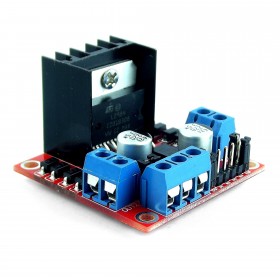

Entre los puente H más comunes tenemos el L298N, L293D, TB6612FNG y el L9110S , Algunos módulos aparte de los pines para controlar la dirección tienen un pin (Enable ) por donde podemos enviar PWM y controlar la velocidad, pero para este tutorial podemos usar cualquiera pues solo controlaremos dirección.
Motores con Llanta:
Básicamente 2 motores DC con caja reductora y su respectiva llanta, una velocidad promedio puede ser 100RPM, pero dependerá de la velocidad que uno desee.


El voltaje dependerá de la batería, por ejemplo si tienen una batería de 6V o de 3.7V se puede trabajar con el motor amarillo, si tienen una batería de 12V o 9V pueden trabajar con los micro motores, Si alimentamos un motor con un voltaje inferior al nominal, su velocidad disminuye, en cambio sí alimentamos con un voltaje superior podemos malograr el motor, por eso debemos de tener en cuenta las especificaciones técnicas del motor.
Batería
Esto tal vez sea lo más difícil de establecer, lo primero que hay que tener en cuenta es el voltaje. Arduino trabaja con un voltaje entre 6 y 12V, aparte de esto hay que tener en cuenta el voltaje del motor. También hay que considerar la corriente y la capacidad, por ejemplo si usamos una pila económica de 9V nos durará menos de un minuto, se recomienda que la capacidad sea superior a 500mAH
A continuación mostramos las opciones que pueden usar dependiendo del motor que tengan:
Motor de 6V:
Opción 1: 4 pilas AA para los motores y una de 9V para el Arduino
Opción 2: 1 celda de litio (batería de celular) para los motores y una pila de 9V para el Arduino
Opción 2: Cualquier batería superior a 6V (de suficiente corriente) y un step down para bajar el voltaje.
Motor de 12V:
Opción 1: Pila duracell 9V
Opción 2: batería lipo o litio de 2 o 3 celdas.
Opción 3: cualquier Batería de 12V (de suficiente corriente)
Opción 4: 1 celda de litio (batería de celular) o batería de 3.7V y un step Up para aumentar el voltaje.
Independiente del valor del voltaje de la batería podemos usar conversores DC-DC para aumentar (step up) o reducir (step down) el voltaje.
Chasis y rueda loca
Esto dependerá del diseño de cada uno, pueden hacerlo, o comprar uno hecho. El chasis básicamente es en donde se va a poner los dos motores con llanta y los demás componentes, adicionalmente se necesita una rueda giratoria o una ballcaster, que será el tercer punto de apoyo junto a las otras dos llantas.

Otros accesorios:
Adicionalmente podemos necesitamos un protoboard, cables DuPont Macho-Macho y Hembra-Macho y cablecillo para soldar los motores.
2. Ensamblando la parte mecánica de nuestro Robot Móvil:
Existen varios diseños en internet que nos pueden ayudar, así como existen plataformas comerciales. Esto dependerá de cada uno,
Para nuestro tutorial usaremos la locomoción diferencial, que utiliza dos ruedas principales que dan la tracción y por diferencia de velocidad en estas podremos realizar giros. Usaremos esta configuración por ser fácil de implantar, a diferencia de la configuración Ackerman (la que usan los vehículo motorizados) que es más complicado de implementar la parte mecánica.
La principal diferencia entre estas dos configuraciones es en el giro del robot, en la configuración diferencial tenemos que invertir el giro en uno de los motores o simplemente disminuir la velocidad, en cambio en la configuración Ackerman necesitamos de un servomotor para girar las llantas delanteras.
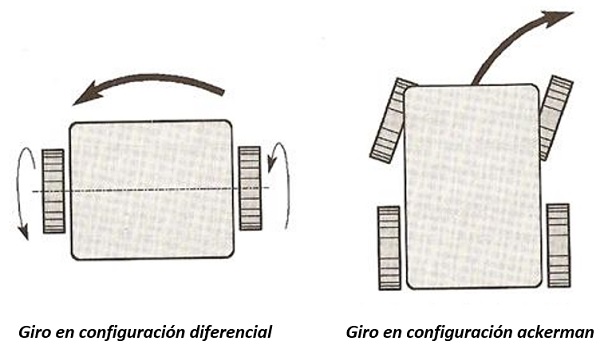
Como indicamos nosotros vamos a trabajar en la configuración diferencial y adicionalmente a las dos llantas principales necesitamos una o dos ruedas giratorias que nos servirán de apoyo, esta rueda lo podemos poner adelante y/o atrás.

3. Conexiones eléctricas:
A continuación mostramos dos posibles conexiones dependiendo del tipo de motor que tengan.
3.1 Para motores DC de 3-6VDC
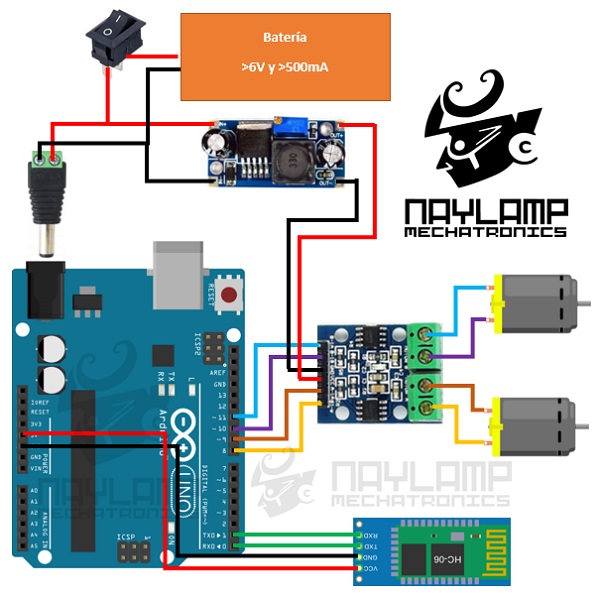
Para este caso si necesitamos usar una sola batería, es mejor usar un step down y no alimentar los motores con los 5V del Arduino, pues sobrecalentaríamos el regulador interno que tiene.
La betería tiene que ser superior a 6V para que pueda trabajar nuestro Arduino pero se recomienda que tampoco sea superior a los 12V, adicionalmente la batería debe tener suficiente corriente para que pueda alimentar los dos motores, de lo contrario nuestro Arduino se va a estar reseteando cuando empiecen a funcionar los motores.
Antes de instalar el step down hay que regular al voltaje que deseamos, puede ser 6v, 5V, 3v, etc, variando este voltaje también estamos modificando la velocidad de los motores.
3.2 Para motores DC de 12V DC
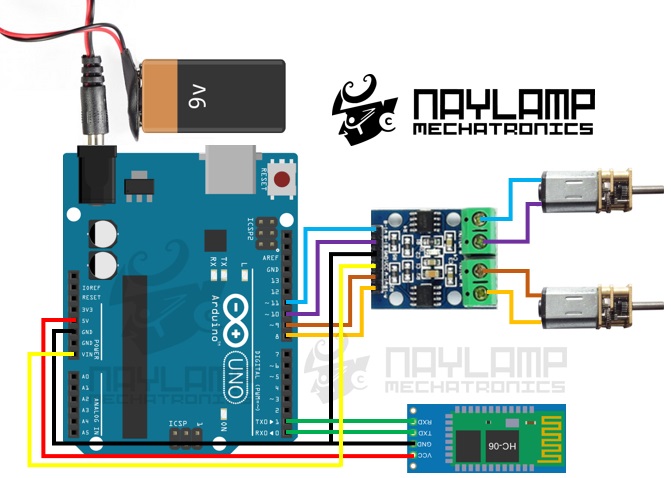
De esta forma el voltaje que ingresa a los motores es el mismo que el de la batería.
Dependiendo del tipo de motor puedes usar la batería que más se adecue a tu necesidad, teniendo en cuenta que tenga la suficiente corriente y duración.
Las conexión son similares para otros tipos de Drivers Puente H, pueden revisar nuestro tutorial de uso del L298N en caso estén usando ese módulo.
4. Programación de nuestro Robot Móvil
Para que tengan una mayor comprensión trabajaremos el programa en dos etapas:
4.1. Test de movimientos
En este primer ejemplo probaremos los diferentes movimientos del robot, lo realizaremos aun sin conexión Bluetooth para poder entender mejor el programa.
Para poder programar necesitamos desconectar el módulo Bluetooth, podemos desconectar todo el módulo o simplemente dejar libre el RX (pin 0) del Arduino
El código es el siguiente:
//Pines de conexión del driver
int Pin_Motor_Der_A = 8;
int Pin_Motor_Der_B = 9;
int Pin_Motor_Izq_A = 10;
int Pin_Motor_Izq_B = 11;
void setup() {
// inicializar la comunicación serial a 9600 bits por segundo:
Serial.begin(9600);
// configuramos los pines como salida
pinMode(Pin_Motor_Der_A, OUTPUT);
pinMode(Pin_Motor_Der_B, OUTPUT);
pinMode(Pin_Motor_Izq_A, OUTPUT);
pinMode(Pin_Motor_Izq_B, OUTPUT);
}
void loop() {
//movemos el robot hacia delante por 2 segundos
Mover_Adelante();
delay(2000);
//movemos el motor a la derecha por 2 segundos
Mover_Derecha();
delay(2000);
}
void Mover_Adelante()
{
digitalWrite (Pin_Motor_Der_A, HIGH);
digitalWrite (Pin_Motor_Der_B, LOW);
digitalWrite (Pin_Motor_Izq_A, HIGH);
digitalWrite (Pin_Motor_Izq_B, LOW);
}
void Mover_Retroceso()
{
digitalWrite (Pin_Motor_Der_A,LOW );
digitalWrite (Pin_Motor_Der_B,HIGH );
digitalWrite (Pin_Motor_Izq_A,LOW );
digitalWrite (Pin_Motor_Izq_B,HIGH );
}
void Mover_Derecha()
{
digitalWrite (Pin_Motor_Der_A,LOW );
digitalWrite (Pin_Motor_Der_B,HIGH );
digitalWrite (Pin_Motor_Izq_A,HIGH);
digitalWrite (Pin_Motor_Izq_B,LOW);
}
void Mover_Izquierda()
{
digitalWrite (Pin_Motor_Der_A,HIGH);
digitalWrite (Pin_Motor_Der_B,LOW);
digitalWrite (Pin_Motor_Izq_A,LOW );
digitalWrite (Pin_Motor_Izq_B,HIGH );
}
void Mover_Stop()
{
digitalWrite (Pin_Motor_Der_A, LOW);
digitalWrite (Pin_Motor_Der_B, LOW);
digitalWrite (Pin_Motor_Izq_A, LOW);
digitalWrite (Pin_Motor_Izq_B, LOW);
}
Como se observa la programación es fácil, se ha programado cada movimiento del robot en funciones separadas, las cuales llamamos desde el void loop(),
Para probar los movimientos hay que ir probando cada función y ver si nuestro robot se mueva de la misma manera como se lo ha programado, por ejemplo así como está el código, después de encender o resetear el Arduino debe moverse hacia delante por 2 segundos, seguidamente debe girar a la derecha por dos segundos más y lego repetir la secuencia, si el robot gira en dirección equivocada, entonces debemos de cambiar la polaridad de motor que gira en sentido erróneo.
Podemos ir probando los movimientos de forma individual reprogramando cada vez para cambiar el movimiento o programar todos a la vez con pausas entre movimientos, eso dependerá de cada uno, después de estar seguros que nuestro robot funciona correctamente pasamos a implementar la comunicación Bluetooth.
4.2. Robot Móvil controlado por Bluetooth
Para controlar el Robot usaremos una aplicación en nuestro celular, para esto debemos de instalar en nuestro celular la siguiente aplicacion.

Naylamp Car: Instalar desde Google Play
La aplicación consta de 4 botones una para cada dirección, al presionar el botón para mover adelante, la aplicación envía por Bluetooth el carácter ‘a’ y lo sigue enviando constantemente mientras se tenga presionado. De igual manera para los otros botones, la aplicación envía ‘r’ para retroceso, ‘i’ para izquierda y ‘d’ para mover a la derecha.
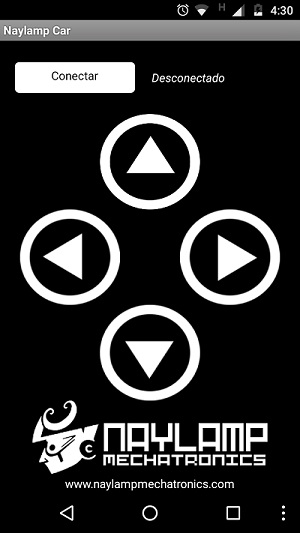
Nuestro Arduino debe de leer estos 4 caracteres y realizar el movimiento, además al no tener un botón stop, nuestro Arduino deberá detener de forma automática los movimientos cuando no se tenga presionado ningún botón.
Antes de cargar el programa a nuestro Arduino debemos de desconectar los cables de nuestro Bluetooth y después de terminado la carga podemos volverlo a conectarlo.
El código que debemos de cargar a nuestro Arduino es el siguiente:
//Pines de conexión del driver
int Pin_Motor_Der_A = 8;
int Pin_Motor_Der_B = 9;
int Pin_Motor_Izq_A = 10;
int Pin_Motor_Izq_B = 11;
int tiempo=0;
void setup() {
// inicializar la comunicación serial a 9600 bits por segundo:
Serial.begin(9600);
// configuramos los pines como salida
pinMode(Pin_Motor_Der_A, OUTPUT);
pinMode(Pin_Motor_Der_B, OUTPUT);
pinMode(Pin_Motor_Izq_A, OUTPUT);
pinMode(Pin_Motor_Izq_B, OUTPUT);
}
void loop() {
if (Serial.available()) {
char dato= Serial.read();
if(dato=='a')
{
Mover_Adelante();
tiempo=0;
}
else if(dato=='r')
{
Mover_Retroceso();
tiempo=0;
}
else if(dato=='d')
{
Mover_Derecha();
tiempo=0;
}
else if(dato=='i')
{
Mover_Izquierda();
tiempo=0;
}
}
if(tiempo<200) // 100 cilcos de 1ms
{
tiempo=tiempo+1;
}
else //ya transcurrió 100ms (100ciclos)
{
Mover_Stop();
}
delay(1); //pasusa de 1ms por ciclo
}
void Mover_Adelante()
{
digitalWrite (Pin_Motor_Der_A, HIGH);
digitalWrite (Pin_Motor_Der_B, LOW);
digitalWrite (Pin_Motor_Izq_A, HIGH);
digitalWrite (Pin_Motor_Izq_B, LOW);
}
void Mover_Retroceso()
{
digitalWrite (Pin_Motor_Der_A,LOW );
digitalWrite (Pin_Motor_Der_B,HIGH );
digitalWrite (Pin_Motor_Izq_A,LOW );
digitalWrite (Pin_Motor_Izq_B,HIGH );
}
void Mover_Derecha()
{
digitalWrite (Pin_Motor_Der_A,LOW );
digitalWrite (Pin_Motor_Der_B,HIGH );
digitalWrite (Pin_Motor_Izq_A,HIGH);
digitalWrite (Pin_Motor_Izq_B,LOW);
}
void Mover_Izquierda()
{
digitalWrite (Pin_Motor_Der_A,HIGH);
digitalWrite (Pin_Motor_Der_B,LOW);
digitalWrite (Pin_Motor_Izq_A,LOW );
digitalWrite (Pin_Motor_Izq_B,HIGH );
}
void Mover_Stop()
{
digitalWrite (Pin_Motor_Der_A, LOW);
digitalWrite (Pin_Motor_Der_B, LOW);
digitalWrite (Pin_Motor_Izq_A, LOW);
digitalWrite (Pin_Motor_Izq_B, LOW);
}
Como se observa al código del primer ejemplo solo le hemos agregado la parte de la comunicación serial, en donde leemos el dato y comparamos para ver si es el carácter correspondiente para realizar su respectivo movimiento, adicionalmente si durante 100 milisegundos no llega ningún dato detenemos el robot, y tan pronto le llega uno de los datos reiniciamos la cuenta de los 100ms.
Una vez que tengan todo listo, tan solo hay que abrir la App, conectarnos a nuestro modulo Bluetooth y empezar a mover nuestro robot con los botones.




















Pr****** *os 05/11/2024 Responder
Estimados amigos.Agradecemos mucho su tutorial, es muy bueno, aprendimos bastante y logramos hacer andar varios vehículos con control Bluetooth. Actualizamos la app a Android versiones de 2024. GRACIAS desde México.
Lo**** 24/04/2024 Responder
Me encanta el proyecto pero no me funciono. Solo se puede usar esa app para manejar el bluetooth o se puede usar la de ARDUINO?Is**** ****** *****es 17/09/2023 Responder
Muchas gracias, todo tal como lo explicas quedo muy bien el roverr . Gracias. Saludos desde el Esto de Mèxico municipio de tultitlanma***** **** 07/02/2023 Responder
Si utilizo dos motores de limpia parabrisas y dos pilas de moto, se podrán quemar los circuitos?al** 21/10/2021 Responder
hola buenos dias, yo estoy utilizando un Polulo driver DRV8825 para los motores, y queria preguntar si el codigo que se muestra en esta pagina se podria utilizar para poder controlor los moter mediante el bluetooth?ya que eh estado teniendo problemas para poder encontrar un codigo para dicho polulo
Fr******* *****ón 03/05/2021 Responder
Gracias! Muy buen articuloma****** 25/08/2020 Responder
Excelente proyecto. lo realizamos con mi hijo y está muy feliz. toda la carcasa la construyó él con legos y quedó genial. ahora hay un par de fallos que no logramos solucionar: avanza y retrocede, pero en el momento de girar a derecha o izquierda, se detiene y pierde la conexión con la naylamp car. La batería es nueva, por cierto y estoy usando el driver l239dJo** *ay 20/06/2020 Responder
Muy buen tutorial acerca de este proyecto, solo un inconveniente y es que no encontre la aplicación en Google Play (2020), asi que ¿Funcionará con otras apps y de ser así cual recomiendas?jo*** 11/01/2024 Responder
nolu** 18/05/2020 Responder
Seria bueno que la app que controla al arduino la puedan hacer en http://ai2.appinventor.mit.edu/ para poder aprenderla, agregarle o modificarle cosas....Muchas gracias por el tutorial!!!
De**** *****ce 27/04/2020 Responder
La Aplicación ya no me funciona y ya no está en Play StoreIndicar como puedo solucionarlo
Jo*** ****ta 23/04/2020 Responder
Buenas Tardes Disculpa un favor me podrías apoyar la apk no conecta con el bletoothMa*** 02/03/2020 Responder
Te felicito por el proyecto. Voy a hacerlo con mis alumnos. Saludos!Wa**** 20/01/2020 Responder
No me funciona. Conecte todo como se ve en la foto, pero me falta un integrado que se ve abajo de donde estaría la fuente de 6v 500ma. No se que es eso, no aparece en el tutorial, pero todo lo demás lo conecte tal cual, saque el bluethoot cargue todo al arduino que me dio el OK, y hasta se me conecta el celular al bluethoot y no pasa nada. No se mueve nada. Lo único que no hice fue enviar la energía de los 6v a la placa arduino, la deje conectada al usb porque estoy probando que funcione antes de armar el auto. Saben que puede ser que este haciendo mal por lo que no me funciona?Au***** 20/01/2020 Responder
Estimado, cuando quiero cargar al modulo de arduino el sistema con bluetooth me arroja el siguiente error.exit status 1
'Mover_Retroceso' was not declared in this scope
Sabes, que le falta a la programacion para solucionarlo?
Ja**** *******ez 11/01/2020 Responder
Que buen tuto amigo, no se si te moleste pero me tome la libertad de mejorar el codigo añadiendo mas cosas por ejemplo unas luces y una bocina ya que recicle un viejo camaro zl1 de HotWheels RCÁn**** 08/12/2019 Responder
Hola, me gusto mucho el proyecto.Tengo un problema y esque al subir el programa a mi arduino uno me lanza varios errores, algunos tienen que ver con la librería.
Ayudenme porfavor!
RI***** **RI 04/11/2019 Responder
disculpa yo tengo un modulo lm298 y no hace nada al conectarlo por obvias razones no use ENA y ENBHu****** *******ez 30/10/2019 Responder
Hay algun problema si solo he configurado todo en ingles y quiero hacerlo con tu codigo en español?Ga****** 26/08/2019 Responder
Hola... espero que alguien me responda es URGENTE . Bueno mi pregunta es la siguiente ¿QUE PROGRAMA TENGO QUE INSTALAR PARA LA PROGRAMACIÓN O SEA PARA REALIZAR EL TEST Y LO OTRO? si me pueden dar mas info es una EMERGENCIAgraciasss
Yo***** ******* ******do 07/08/2019 Responder
Excelente guía... que permite construir el circuito y lograr el movimiento y control. Gracias!!Gu*** *****ar 06/08/2019 Responder
Hola... Muy interesante la programación. No quiero decir que sea sencilla, más bien sería justo indicar que es muy didáctica. Se aprecia muy bien el cómo programar el carrito sin muchos contratiempos y con indicaciones justas y oportunas, de manera tal que el diseño del dispositivo/carro y su programación consecuente son idóneos para trabajar con estudiantes, incluso de edad escolar. Gracias y felicitaciones.Guido Aguilar Marín
De**** *****ce 19/07/2019 Responder
Primero felicitarte me corre bien la aplicación pero también quiero aprender AppInventorPor favor podrías enviarme el código o los bloques en AppInventor..
Soy Docente de Chiclayo, Perú.
Gracias, te saluda Dennis.
Sa** 18/06/2019 Responder
Hola buenas muy buen post, pero tengo error al intentar subir el programa a la placa, porque o no tengo los drivers necesarios o falla el boatloader, me podrías pasar algún enlace de drivers compatibles con arduino uno? graciasro*** 28/05/2019 Responder
hola como se puede realizar en un puente h l298nRo***** ****es 17/05/2019 Responder
No puedes pasar el codigo en formato inoRu*** 15/05/2019 Responder
Hola, he intentado hacer el proyecto. en montaje para el L298N o L293D es el mismo y no modifica la programación o que? ya que no he podido encontrar en mi cuidad el mismo puente H, y estoy trabajando con los motorreductores de carcasa amarilla. muchas graciasas****** 05/05/2019 Responder
gracias, esto me va a servir como guía para mi trabajo, pasa que tengo que combinarlo con Internet de las cosas y lo que quise hacer era que funcionara con app por wifi, pero el profesor quiere que implementemos algo mas con el Internet. me darías un ejemplo de que se podría agregar referente a eso?Ne**** 30/04/2019 Responder
a cuanto de distancia puede llegar la señal de bluetoothGi****** *****on 14/04/2019 Responder
Disculpa amigo, pero al cargar el código me sale un error dónde dice que no fue declarado el ámbito, no sé si me puedas ayudar, copié el código tal y como es.ni***** ******io 18/02/2019 Responder
Hola amigo, muchas gracias por tu explicación, me salio todo muy bien, pero tengo una duda ¿Como puedo agregarle un ultrasónico para que al detectar un obstáculo se detenga?LU** ******DO 16/02/2019 Responder
Amigo, me apoyas por favor, con el codigo cualquier tecla funciona, por ejemplo 8 y10 se activan tanto ala izquierda como adelante, y la 9 y 11 al activar las otras dos, ya cargue varias veces el codigoja**** 08/02/2019 Responder
me sirvió de mucho tu explicación espero me puedas ayudar ya que deseo agregar 2 sensores seguidores de linea y 1 ultrasonico saludos y muchas gracias por aportar tus conocimientos se te agradece hermano.lu** 21/01/2019 Responder
HOLA CARGO EL PROGRAMA EN ARDUINO CON EL CBALE CUANDO LO DESCONECTO Y PONGO LA BATERIA AL ARDUINO YA NO SE MUEVEN LAS LLANTAS DEL MOTORro******** 20/12/2018 Responder
oye amigo la app es solo para google play o tambien se puede en app store?MA*** 04/12/2018 Responder
HOLA MIRA ME SALIO EL PROYECTO QUE AL PUBLICADO PERO ESTOY MODIFICANDO AUMENTANDO UN MOTOR MAS Y CUANDO COMPILO ME SALE ESTO PIN_MOTOR-3_E` WAS NOT DECLARED IN THIS SCOPENO SE QUE ASER E REVISADO TODO NO SI ME PUEDES AYUDAR
lu** ***el 30/11/2018 Responder
como conectaria un puente h TB6612FNG a este proyectoWi*** 30/11/2018 Responder
Geniaaaaal !! Funciono perfectooooo :Dce*** 17/11/2018 Responder
hola, muy bueno el proyecto, lo estoy usando en el arduino, pero no se como agregarle al codigo de arduino para que funcione el sensor de ulatrasonido podrias agregarlo o mandarmelo por email. plsFe****** 21/10/2018 Responder
Hola, está super padre la forma en la que explicas todo el programa. Te quería preguntar sobre qué podría hacer con lo app. Es que yo usé otro puente H, y cambié los pines 8y9 por los pines 5y6 del Arduino Leonardo. Hice la prueba de lo del puente H con tu código (claro, con la modificación del pin 8y9 por 5y6), y me funcionó de maravilla. El problema es que ya cuando lo quise controlar con la app, en esta no me aparece nada de error y tampoco se mueve el carrito. El módulo bluetooth es el HC-06.Sa*** *****vo 12/08/2018 Responder
Cambia la manera en la que se conecta con el puente driver h L298nLu*** ********ez 18/07/2018 Responder
hola queria hacer una pregunta, no hay que cargar ninguna libreria, por lo del driver? Ademas cambia algo si uso el modulo BT Hc-05?Ma** 02/06/2018 Responder
Hola tengo dudas sobre el robot: tienen las conexiones de este robot con Puente driver H L298n y modulo bluethoot HC-5 y el código?Jo*** 09/05/2018 Responder
Quiero saber que funcion usaste para los botones para que mientras lo presiones se envie la señal y cuando dejes de hacerlo esta tambien deje de enviarse.Je**** **no 11/03/2018 Responder
Hola, excelente proyecto que estoy poniendo en prácticas con mis alumnos de robótica en un instituto de secundaria de Castilla-La Mancha, en España. Me gustaría si fuese posible que me pasases el código con el que has creado la app y el programa con el que la has hecho para que ellos pudiesen entender perfectamente todo el proyecto con todo detalle.Muchas gracias.
ma**** 04/03/2018 Responder
holauna pregunta ya conecte todo como lo muestra en el diagrama pero los motores no se mueven solo suena un tic al presionar las flechas para que se mueve
¿que ago?
Lu*** ********ez 18/07/2018 Responder
me pasa lo mismo, pero en la version de test de movimientosre*** 27/10/2017 Responder
buenas noches quería hacerles una consulta, me encuentro estudiando en la universidad y quisiera hacer un puente grúa como proyecto , tengo los rieles de una impresora antigua pero quisiera saber que me recomendarían , o que sensores se deben usar para ese proyecto.jo***** ****** ***da 15/10/2017 Responder
Buenas noches, quisiera saber porque no funciona las app, eh conectado todo como menciona el diagrama, la puebra de movimiento, cambie las baterías y nada, ayuda por favor. GRACIASRa** ******zo 15/10/2017 Responder
Buenas, queria hacerle una consulta acerca del step downEd***** 11/09/2017 Responder
Hola, amigo podrias explicarme en la programcion cual es la funcion de la variable tiempo... De ante mano gracias.Ju** *******ón 22/08/2017 Responder
Hola,muy buen proyecto, me gustaria ponerle una camara, pero no se cual y como ponerle. Alguna ayuda?Na***** 29/08/2017 Responder
Hola Juan, lo más recomendable es que la cámara no lo maneje arduino sino sea totalmente externo, por ejemplo una cámara Wifi inalámbrica o un cámara IP, también puedes usar tu celular como webcam, lo último seria para visualizar la imagen de la cámara del celular en tu PC.Da**** ******* ******* ****es 06/08/2017 Responder
avrdude: ser_open(): can't open device "\.COM1": The system cannot find the file specified.Me sale este error al cargar... motivo?
Gracias
Na***** 29/08/2017 Responder
Hola Daniel. Es porque no tienes seleccionado el puerto COM correcto, si tu PC dejó de reconocer el COM de tu arduino solo desconecta el arduino y vuelve a conectarlo, si es necesario cierra también el IDE.To***** 14/06/2017 Responder
Hola buenas tardes, tengo un problema con este montaje. Una vez empleado el montaje a 9V y cargado el programa (tras haber probado todo con el "test de movimientos") y establecido la comunicación bluethooth, a la hora de mandar los pulsos desde vuestra app, no llega ningúhn tipo de impulso al receptor HC-06 a 9600 baudios. Quisiera saber cómo puedo solucionarlo. Gracias de antemano.Na***** 30/06/2017 Responder
Hola, primero asegúrate si la app se a conectado al HC-06, el led del HC-06 debe dejar de parpadear mientras esté conectado. Asegúrate de haber conectado correctamente los pines RX y TX como en la imagen (cruzado rx con tx), el cable USB debe de estar desconectado de la PC (o por lo menos cerrado el monitor serial). Verifica que la batería tenga suficiente corriente para alimentar todo el circuito. Verifica que el HC-06 está configurado a 9600Ra** ******zo 15/10/2017 Responder
Buenas, quiero hacerle una consulta acerca del step downni***** 18/08/2017 Responder
hola naylamp, estoi haciendo un proyecto de un auto con cuatro motores los cuales controlo con el motor shield que permite hasta cuatro motores y utilizando la libreria af.motor la cosa es que me pasa justamente lo que dices en el comentario al estar el arduino conectado a una fuente externa el modulo bluetooth se conecta al mobil pero en 2 segundos se desconecta alcanzo a hacer que avance, retroceda o doble rapido y se desconecta al contrario cuando esta conectado al computador no se desconecta del celular el bluetooth, el arduino lo alimento con 5v y los motores y el shield con otra fuente externa. si me pudieras ayudar, gracias.Lu** 29/05/2017 Responder
Una pregunta y si trabajo con cuatro motores cuanta bateria seriapa*** ******ez 26/02/2017 Responder
Que maravilla lo bien que lo explicáis. Voy a usar este ejemplo para dar clases en España.Muchas gracias!
Ju** ****** ********** ****ez 29/12/2016 Responder
Hola amigo!!Felicidades por lo bien que explicas y ayudas tanto a gente
como yo que tenemos medio siglo de edad y seguimos estudiando electrónica.
He realizado un trabajo con tres motores para una pequeña grúa y tú programación
de Arduino me ha venido genial y he podido incorporar el tercer motor y he cambiado los movimientos.
Tengo un pequeño problema al hacerme mi propia app con MIT App inventor que cuando pulso el botón del móvil
me lo hace como un click, aunque lo haga con "touch down" y con tu aplicación si me funciona los motores mientras lo tengo pulsado (No me sirve la tuya porque necesito dos botones para el tercer motor)
Ojalá me puedas ayudar
Un abrazo desde Martos (Jaén) ESPAÑA
Feliz año nuevo!!
Er***** *******ez 17/10/2018 Responder
Excelente hermano, explicas de una forma didáctica que se te entiende. Solo te pido que me envíes la aplicación hecha con App Inventor 2. Gracias desde Lima - Perú