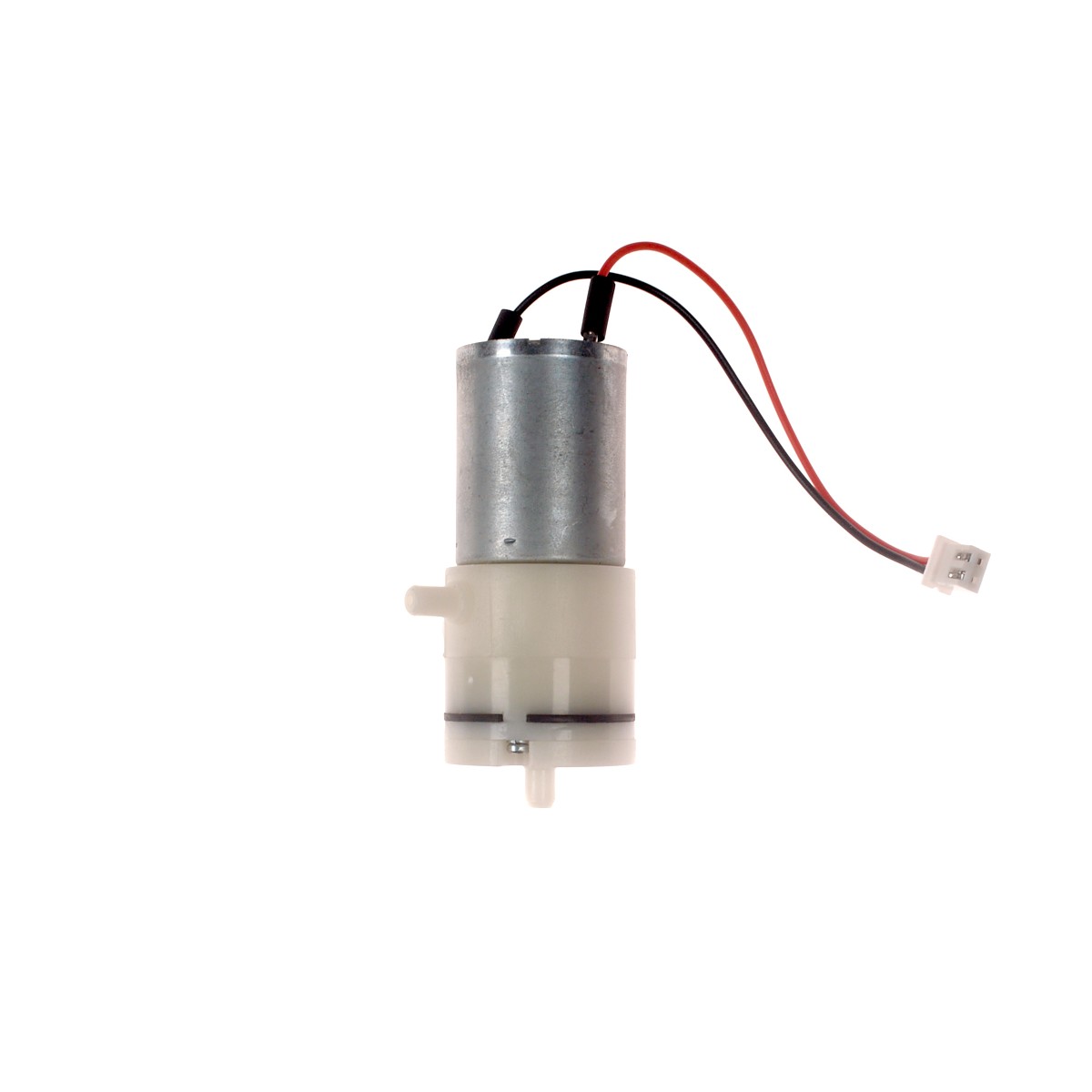
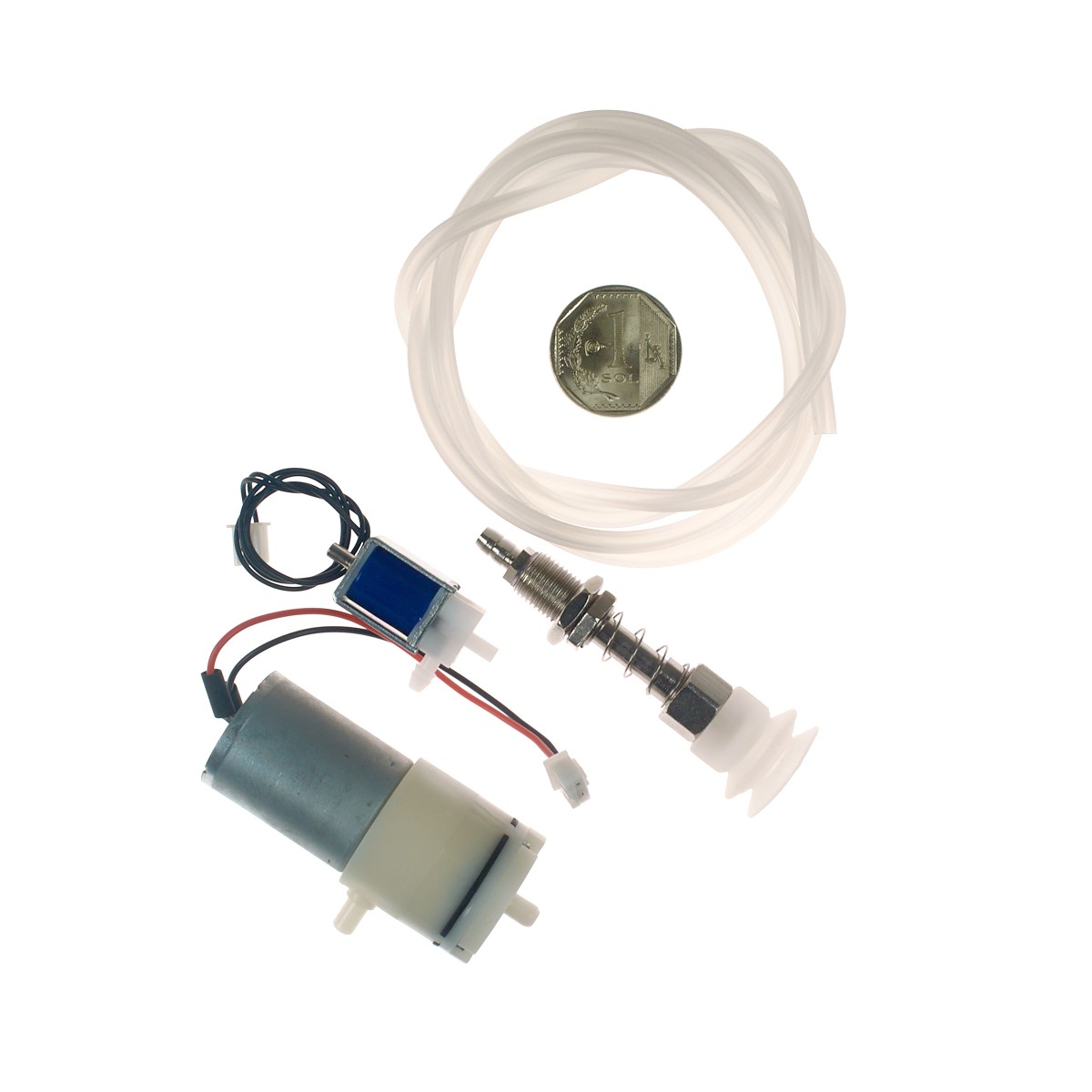
Los sistemas de elevación/sujeción por vacío utilizan tecnología de vacío para sujetar objetos gracias a la succión que se genera en el actuador final(Ventosa). El sistema de vacío consta de una bomba de vacío, conectada por una manguera a un cabezal de succión que aseguran un agarre hermético de la carga durante todo el proceso de manipulación. Generalmente entre la bomba y el cabezal de succión va una válvula de tres vías que se activa cuando se desea liberar el vacío y así poder soltar el objeto. Están diseñados para superficies lisas, objetos con superficie porosa o irregulares posiblemente no logren un buen agarre.
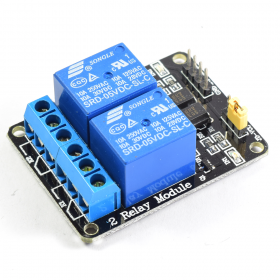
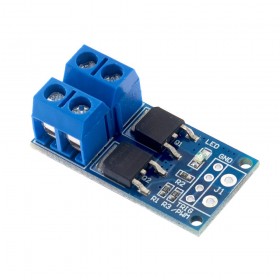
Controlar la bomba de vacío es muy sencillo con la ayuda de un driver de potencia o relay, de igual manera con la válvula solenoide. El uso de drivers tanto para la bomba como para la válvula es necesario pues la corriente y voltaje son mayores a los usados por el Arduino o microcontrolador, si conectamos directamente el microcontrolador a la bomba o válvula dañaremos nuestro circuito de forma irreversible. Recomendamos utilizar drivers de potencia tipo estado sólido, como: Módulo Mosfet. También podemos utilizar Relays como drivers como puede ser un Módulo Relay, Shield Relay.