
En Stock
SKU: 000142
S/ 40,00
Módulo ideal para manejar hasta 16 salidas PWM utilizando solo 2 pines I2C.





EL controlador PCA9685 fue diseñado para controlar leds por PWM, pero también nos permite controlar servos, ya que estos también se controlan por PWM, aplicación que actualmente es muy usada.
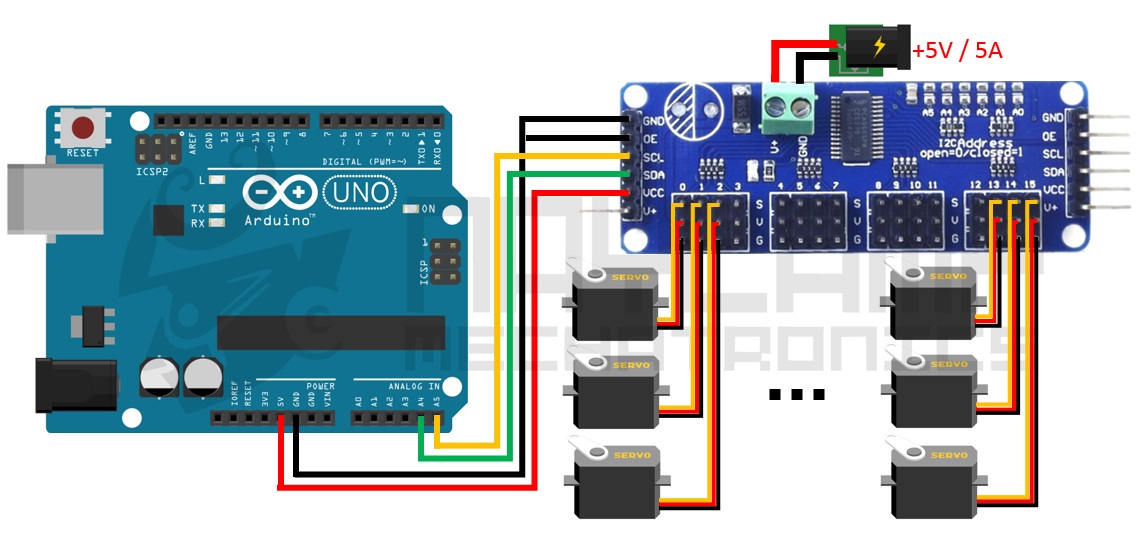
El Módulo Controlador de servos PCA9685 tiene la placa diseñada para el control de servos, tiene los pines en el orden correcto para simplemente conectar los servomotores, además una bornera para la alimentación de los servos y conectores para la alimentación de la parte lógica junto con los pines I2C para comunicarse con arduino.
Se puede establecer la dirección I2C soldando los puentes A0-A5 con esto podemos usar el mismo bus I2C para controlar más módulos PCA9685 u otros dispositivos I2C
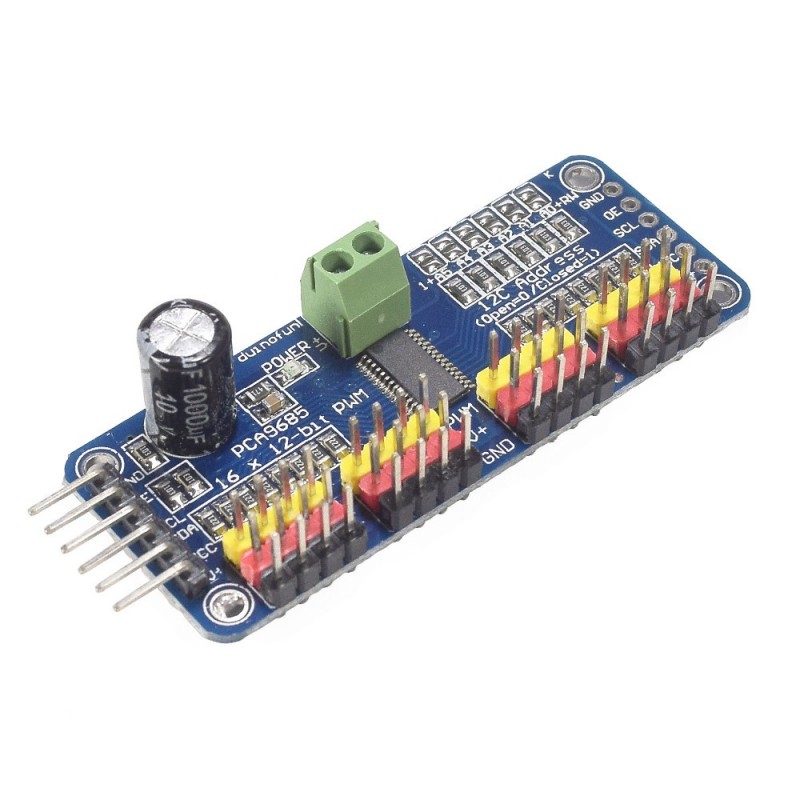
EL PCA9685 nos permite controlar individualmente 16 salidas PWM con 12 bits de resolución y con frecuencia máxima de 1600Hz.
La salida PWM que envía el PCA9685 es de la siguiente forma:
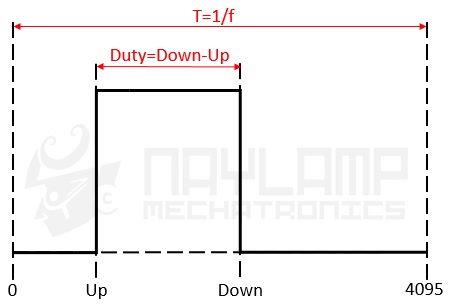
Básicamente lo se tiene que establecer es la frecuencia de la señal PWM, frecuencia que será la misma para las 16 salidas PWM. Para establecer el ciclo de trabajo (Duty) tenemos que manipular el flanco de subida (Up) y flanco de bajada (Down), esto se configura individualmente para cada salida PWM, La resolución del PWM es de 12 bits (de 0 a 4095)
|
Módulo PCA9685 |
Arduino Uno, Nano, Mini. |
Arduino Mega , DUE |
Arduino Leonardo |
|---|---|---|---|
|
GND |
GND |
GND |
GND |
|
OE |
GND |
GND |
GND |
|
SCL |
A5 |
21 |
3 |
|
SDA |
A4 |
20 |
2 |
|
VCC |
5V |
5V |
5V |
|
+V |
No conectado |
No conectado |
No conectado |
VCC es la alimentación para la parte lógica del módulo y V+ es la alimentación para los servomotores, entonces adicionalmente se tienen que conectar una fuente externa a V+ y GND, fuente que debe ser del voltaje correspondiente a los servos. No usar los 5V que entrega Arduino para alimentar a lo servos pues los 5V que entrega la placa Arduino es de poca corriente.
La mayoría de servos trabajan con voltajes de 4.5 y 6V nosotros usaremos una fuente de 5V / 5A.
La corriente mínima de la fuente externa depende del tipo de servomotores que se use y de la cantidad de servos que estarán conectados, Si bien la corriente no es un dato constante en el servomotor es mejor sobredimensionar la fuente para que trabaje correctamente, si la fuente no es muy estable o genera ruido, es necesario soldar un condensador en el espacio de la placa del Módulo con una valor de 1000uF o el equivalente a 100uF por cada servomotor.
Entonces, gráficamente las conexiones serian dela siguiente forma:
Usaremos la librería de Adafruit el cual lo pueden descargar aquí:
https://github.com/adafruit/Adafruit-PWM-Servo-Driver-Library
Después de descargar necesitan importar la librería al IDE Arduino
Expliquemos como usar la librería:
Como cualquier librería inicialmente se incluyen las librerías correspondientes y se declara la variable u objeto:
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver servos = Adafruit_PWMServoDriver(dirección);
La dirección si no han modificado en su placa del módulo PCA9685 es 0x40, si desean modificar la dirección, necesitan soldar los puentes de la placa, y queda establecida por: Dirección=0|1|A5|A4|A3|A2|A1|A0, por ejemplo si no sueldan ningún puente seria 01000000=0x40, si sueldan el segundo puente seria: 01000100=0x44
El siguiente paso es inicializar el objeto creado anteriormente.
servos.begin();
Posteriormente configurar la frecuencia del PWM, que será la misma para los 16 canales PWM
servos.setPWMFreq(60);
La frecuencia que usamos es de 60Hz que equivale una señal PWM con periodo 16,6ms que se encuentra dentro del rango del ciclo de trabajo de la mayoría de los servos
Para establecer el ancho de pulso de una salida PWM usamos la siguiente función
servos.setPWM(n_servo, up, down);
En este caso n_servo es el número de servo o salida que van a configurar (valor entre 0 y 15), up es el valor de cuentas en el que se producirá el flanco de subida, y down el valor para el flanco de bajada, ambos valores deben estar entre el valor de 0 y 4096 (12bits). El ancho de pulso será la resta de down-up.
Explicado el uso de la librería vamos a ver unos ejemplos:
Este ejemplo hace una barrido de 0 a 180° y después de 180° a 0°, el barrido se hace a todos los servos por igual.
Antes de empezar necesitamos saber el ancho de pulso (duty) para la posición 0° y el correspondiente para 180°
Trabajaremos con 172 (0.7ms) para la posición 0° y 565(2.3ms) para la posición 180°
Para otros valores de los extremos del servo pueden calcularlo con la siguiente formula:
nCuentas=Pulso_ms*(frecuencia_Hz/1000)*4096
Generalmente se acostumbra aumentar o disminuyen los valores mínimo (0°) y máximo (180) hasta conseguir los valores para el rango correcto,
El sketch es el siguiente:
#include <Wire.h> #include <Adafruit_PWMServoDriver.h> Adafruit_PWMServoDriver servos = Adafruit_PWMServoDriver(0x40); unsigned int pos0=172; // ancho de pulso en cuentas para pocicion 0° unsigned int pos180=565; // ancho de pulso en cuentas para la pocicion 180° void setup() { servos.begin(); servos.setPWMFreq(60); //Frecuecia PWM de 60Hz o T=16,66ms } void loop() { for (int duty = pos0; duty < pos180; duty=duty+10) { for(int n=0;n<16;n++) { servos.setPWM(n,0,duty); } } delay(1000); for (int duty = pos180; duty > pos0; duty=duty-10) { for(int n=0;n<16;n++) { servos.setPWM(n,0,duty); } } delay(1000); }
Para la mayoría de aplicaciones los servomotores van a estar en diferente posición, para este caso es mejor hacer una función que nos calcule y envié el valor en cuentas al servo y manipular el servo desde el void loop() con con valores de 0 y 180.
La función seria la siguiente:
void setServo(uint8_t n_servo, int angulo) { int duty; duty=map(angulo,0,180,pos0, pos180); servos.setPWM(n_servo, 0, duty); }
Con esta función podemos enviar a cualquier servomotor el valor del ángulo al que queremos que se ubique.
El sketch que se muestra a continuación mueve los servomotores cada segundo a posiciones establecidas:
#include <Wire.h> #include <Adafruit_PWMServoDriver.h> Adafruit_PWMServoDriver servos = Adafruit_PWMServoDriver(0x40); unsigned int pos0=172; // ancho de pulso en cuentas para pocicion 0° unsigned int pos180=565; // ancho de pulso en cuentas para la pocicion 180° void setup() { servos.begin(); servos.setPWMFreq(60); //Frecuecia PWM de 60Hz o T=16,66ms } void setServo(uint8_t n_servo, int angulo) { int duty; duty=map(angulo,0,180,pos0, pos180); servos.setPWM(n_servo, 0, duty); } void loop() { setServo(0,30); setServo(2,90); setServo(4,180); setServo(6,120); setServo(8,0); setServo(10,30); setServo(12,90); setServo(14,170); delay(1000); setServo(1,30); setServo(3,90); setServo(5,180); setServo(7,120); setServo(9,30); setServo(11,90); setServo(13,180); setServo(15,120); delay(1000); setServo(0,120); setServo(2,180); setServo(4,90); setServo(6,60); setServo(8,45); setServo(10,160); setServo(12,170); setServo(14,30); delay(1000); setServo(1,120); setServo(3,0); setServo(5,90); setServo(7,60); setServo(9,120); setServo(11,180); setServo(13,0); setServo(15,30); delay(1000); }
Usando este ejemplo como base ya pueden realizar cualquier aplicación.
En el caso que usen diferentes tipos de servomotores con diferente rango del ancho de pulso; incluso siendo del mismo fabricante en sus modelos de servos los valores mínimo y máximo pueden variar, por ejemplo para algunos casos el ancho de pulso para la posición 0° puede ser 0.7ms, 1ms u otro valor, de igual forma para la posición 180°.
Para este caso se necesita tener en cuenta que si bien la señal PWM puede ser el mismo para todos los servos debemos de tener como referencia diferentes valores del rango del ancho de pulso. Esto lo hacemos haciendo las siguientes modificaciones en el código anterior:
Al declarar las posición 0 y 180, lo debemos hacer con valores independientes para los 16 servos:
unsigned int pos0[16]= {172,172,172,246,246,172,246,200,200,150,160,172,172,172,200,246}; unsigned int pos180[16]={565,256,256,492,492,565,492,550,550,600,590,565,565,565,550,492};
Y en la función para mover el servo debemos de usar estos valores a la hora de convertir de ángulo a duty
void setServo(uint8_t n_servo, int angulo) { int duty; duty=map(angulo,0,180,pos0[n_servo], pos180[n_servo]); servos.setPWM(n_servo, 0, duty); }
También pueden modificar el valor 180 en caso quieran trabajar con valores de 0 a 255, valores con los que muchos traban puesto que ocupa un byte en la comunicación.

Gran selección de productos para fabricación digital aditiva, desarrolla tu creatividad
Por favor, regístrese primero.
RegistrarseCrear una cuenta gratuita para usar listas de deseos.
Registrarse











ai*** 02/06/2023 Responder
hola me pasarian el codigoAl******* ****ro 22/10/2022 Responder
hola,estoy haciendo un robot y tiene 15 servos, con placa Arduino uno y modulo PCA9685, mi pregunta es, ¿como puedo ponerle una bateria de litio de 12v y 20000mah? creo que con modulo regulador de voltaje LM2596, ¿pero el amperage como se cambia para la placa arduino uno?, gracias.Ma*** ***** ******as 31/10/2020 Responder
Se puede modificar la función, para mover los servos grado a grado?void setServo(uint8_t n_servo, int angulo) {
int duty;
duty=map(angulo,0,180,pos0, pos180);
servos.setPWM(n_servo, 0, duty);
}
Le he dado mil vueltas y no lo consigo, Agradecería orientación.
Un Cordial Saludo.
da*** ******* *****ar 14/10/2020 Responder
hola, excelente trabajo...Para el caso de servomotor de 360, como puedo controlar su paro, utilizando esta placa
ro***** ****ga 06/09/2020 Responder
Hola amigos!! Saludos desde Chile,Tengo 3 PCA 9685,conectadas,la primera mueve servos sin problemas, pero la segunda y tercera no mueven los servos, encienden con su luz roja y todo, el sketch lo copie de aqui y agregue lo sugerido ,estara bien? este es:
#include
#include
Adafruit_PWMServoDriver servos1 = Adafruit_PWMServoDriver(0x40);
Adafruit_PWMServoDriver servos2 = Adafruit_PWMServoDriver(0x41);
Adafruit_PWMServoDriver servos3 = Adafruit_PWMServoDriver(0x42);
unsigned int pos0=125; // ancho de pulso en cuentas para pocicion 0°
unsigned int pos180=575; // ancho de pulso en cuentas para la pocicion 180°
void setup() {
servos1.begin();
servos2.begin();
servos3.begin();
servos1.setPWMFreq(50);
servos2.setPWMFreq(50);
servos3.setPWMFreq(50);//frecuecia PWM de 50Hz o T=16,66ms
}
void setServo(uint8_t n_servo, int angulo) {
int duty;
duty=map(angulo,0,180,pos0, pos180);
servos1.setPWM(n_servo, 0, duty);
servos2.setPWM(n_servo, 0, duty);
servos3.setPWM(n_servo, 0, duty);
}
void loop() {
setServo(0,0);
setServo(16,0);
setServo(15,0);
delay(2000);
setServo(0,30);
setServo(16,30);
setServo(15,50);
delay(2000);
}
Fe*** 29/03/2023 Responder
Qué tal ? Si no me equivoco. La segunda placa y la tercera, deben ir conectadas a las salidas de la primera placa PCA9685. Y tanto la primera como la segunda como la tercera placa, tienen que identificarse. Lo hacen con los pines que están separados y sin ningún conector y están junto a la entrada de alimentación externa (la "regleta de plástico con tornillos) los pares de pines sin soldar (sin juntar con un puente) son 0 y los unidos o puenteados son 1. Y se refieren a un numero exadecimal por eso si no sueldan ningún puente seria 01000000=0x40, si sueldan el segundo puente seria: 01000100=0x44 y así a continuación.En definitiva creo que no identificaste bien las placas con sus direcciones según hiciste los puentes .
Da******** **eh 10/07/2020 Responder
Nice articleki**** ******** **ys 02/06/2020 Responder
Thank youUc** 27/05/2020 Responder
Thanks a lotSa**** 27/05/2020 Responder
THis is amazingJo*** ***lo 27/02/2020 Responder
El programa me funcionó a la perfección, pero quiero saber si es posible cambiar los pines de SDA y SCL a otros pines analógicos debido a que también deseo conectar un acelerometro MPU6050 y también usa esos mismos pines A4 y A5. ¿O no hay problema si uso los mismos pines para ambos módulos?0a*** 22/09/2020 Responder
No hay problema de conectar varios dispositivos a esos pines, lo único que cambiaria es la dirección i2c del dispositivo, como lo mencionan al principio del post la dirección para los servos es 0x40, para el acelerometro la dirección cambiagu***** 18/08/2019 Responder
Disculpa la,placa puede con 16 servos mg995?y me gustaria saber si una bateria lipo con 25c ( es decir que suministra 25 veces mas la corriente establecida) es capaz de alimentarlos
Ma***** 31/05/2019 Responder
hola, me gustaría usar placa arduino uno + pca9685 para accionar 8 servos con pulsadores, alguien podría facilitarme el sketch así como un esquema de las conexiones?perdonad si pido mucho pero es que no se nada de arduino pero me parece muy interesante para mover los desvíos
un saludo y gracias por adelantado
Ma***** 06/05/2019 Responder
Hola esto me marca como error #includeAk*** 03/04/2019 Responder
Me quedo loco a leer, que pena que todo esto me suene a chino, pero le estot poniendo interes. Asi que Gracias a ti y a los que estan comentandoRo***** ****** ********* ***ez 03/03/2019 Responder
buenas noches como seria el codigo para poder modificar la velocidad si tengo servos de rotacion continuaOs*** ****co 13/04/2018 Responder
Hola, estoy trabajando en un proyecto de feria de mi instituto. Es un robot humanoide de 17 servomotores, estoy utilizando Arduino UNO y el mudulo PCA9865.El problema es el siguiente, cuando estoy programando todo va bien, las posiciones responden bien, pero el problema viene cuando ya dejó de trabajar con el robot y desconectó y lo guardo. Cuando vuelvo a conectar todo para continuar con la programación de la secuencia que quiero lograr, pues las posiciones no cogen el ángulo en qué estaba la otra vez, y vuelvo y subo el programa a Arduino y sigue con esa posición diferente, es como si el ángulo 50 cambiara y no es el mismo que el de la otra vez.
Con el robot lo que quiero lograr es una secuencia de movimientos para hacer una demostración de éste, ya sea que camine y salude, etc.
El código que utilizo es este.
Nota: es solo un ejemplo
#include
#include
Adafruit_PWMServoDriver servos = Adafruit_PWMServoDriver(0x40);
unsigned int pos0=172; // ancho de pulso en cuentas para pocicion 0°
unsigned int pos180=565; // ancho de pulso en cuentas para la pocicion 180°
void setup() {
servos.begin();
servos.setPWMFreq(60); //Frecuecia PWM de 60Hz o T=16,66ms
}
void setServo(uint8_t n_servo, int angulo) {
int duty;
duty=map(angulo,0,180,pos0, pos180);
servos.setPWM(n_servo, 0, duty);
}
void loop() {
setServo(0,30);
setServo(2,90);
setServo(4,180);
setServo(6,120);
setServo(8,0);
setServo(10,30);
setServo(12,90);
setServo(14,170);
delay(1000);
setServo(1,30);
setServo(3,90);
setServo(5,180);
setServo(7,120);
setServo(9,30);
setServo(11,90);
setServo(13,180);
setServo(15,120);
delay(1000);
setServo(0,120);
setServo(2,180);
setServo(4,90);
setServo(6,60);
setServo(8,45);
setServo(10,160);
setServo(12,170);
setServo(14,30);
delay(1000);
setServo(1,120);
setServo(3,0);
setServo(5,90);
setServo(7,60);
setServo(9,120);
setServo(11,180);
setServo(13,0);
setServo(15,30);
delay(1000);
}
Go***** 08/04/2018 Responder
Qué tal.Me gustaría aplicar este ejemplo para el control de leds. Podria apoyarme en eso.
De antemano, Gracias.
Go***** 08/04/2018 Responder
Hola qué talMe gustaría saber cómo podría aplicar este ejemplo para controlar leds. Dar un tiempo de encendido a cada salida. Podrías apoyar con eso.
De antemano, Gracias.
CH******* 17/03/2018 Responder
Hola me gustaria saber por que cuando conecto mi fuente de alimentacion al modulo mis servos accionan si razon aparente no hace caso a las intrucciones que le pongo al arduino llevo todo el dia intentando saber por que pero no he encontrado nada... me podrian ayudarvi**** 29/12/2017 Responder
Hola, buenas noches, muchas gracias por este tutorial.Tu pones el pin OE a masa (GND), ¿esto lo haces para evitar ruido? ¿o hay algún motivo más significativo?
Desde ya, gracias por responder.
MA** 16/03/2018 Responder
OE es para habilitar o deshabilitar las salidas. Conectado a GND quedan habilitadas por default, sino se puede conectar a una salida del microcontrolador y controlar por software.La**** 09/10/2017 Responder
Y si quiero conectar dos o mas de estas placas como seria el codigo?MA** 16/03/2018 Responder
Adafruit_PWMServoDriver servos1 = Adafruit_PWMServoDriver(DIRECCION_PLACA1); //Por default 0x40Adafruit_PWMServoDriver servos2 = Adafruit_PWMServoDriver(DIRECCION_PLACA2);
.
.
.
Adafruit_PWMServoDriver servosN = Adafruit_PWMServoDriver(DIRECCION_PLACA_N);
servos1.begin();
servos2.begin();
.
.
servosN.begin();
ro***** ****ga 06/09/2020 Responder
Hola amigos!! Saludos desde Chile,Tengo 3 PCA 9685,conectadas,la primera mueve servos sin problemas, pero la segunda y tercera no mueven los servos, encienden con su luz roja y todo, el sketch lo copie de aqui y agregue lo sugerido ,estara bien? este es:
#include
#include
Adafruit_PWMServoDriver servos1 = Adafruit_PWMServoDriver(0x40);
Adafruit_PWMServoDriver servos2 = Adafruit_PWMServoDriver(0x41);
Adafruit_PWMServoDriver servos3 = Adafruit_PWMServoDriver(0x42);
unsigned int pos0=125; // ancho de pulso en cuentas para pocicion 0°
unsigned int pos180=575; // ancho de pulso en cuentas para la pocicion 180°
void setup() {
servos1.begin();
servos2.begin();
servos3.begin();
servos1.setPWMFreq(50);
servos2.setPWMFreq(50);
servos3.setPWMFreq(50);//frecuecia PWM de 50Hz o T=16,66ms
}
void setServo(uint8_t n_servo, int angulo) {
int duty;
duty=map(angulo,0,180,pos0, pos180);
servos1.setPWM(n_servo, 0, duty);
servos2.setPWM(n_servo, 0, duty);
servos3.setPWM(n_servo, 0, duty);
}
void loop() {
setServo(0,0);
setServo(16,0);
setServo(15,0);
delay(2000);
setServo(0,30);
setServo(16,30);
setServo(15,50);
delay(2000);
}
Ví***** 22/09/2017 Responder
Exelente trabajo muy bien explicado ahora como se conectaría con un BluetoothAn**** 11/08/2017 Responder
Hola, muy buen trabajo y me funciona, pero si quisiera bajarle la velocidad de giro de los motores,¿¿ como puedo hacerlo??Na***** 22/08/2017 Responder
Hola Andres, lamentablemente en estos servos no se pueden controlar la velocidad, salvo en los de rotación continua. Una forma de simular el cambio de velocidad es en no mover directamente de un punto a otro, sino en llevarlo de grado en grado haciendo pausas, similar al primer ejemplo pero con pequeñas pausas.al** 06/07/2017 Responder
a mi me paso lo siguiente hice un programa basado en el ejemplo y primero use una fuente de 2 ampers 5 v que noo podia alimentar los 12 servos de 15kg, luego use una fuente de computadora de 5.5v a 20A y se quemo un transistor cerca del condensador y del led mis dudas son: se podra reparar?y cuanto amperaje resiste maximo ?
a y si puede usarse la placa sin ese transistor ?
en lo personal ya no me funiona la placa pero el transistor solo se quemo cuando el programa corria aunque ya tubiera el amperaje conectado alguna idea?
Na***** 16/07/2017 Responder
Hola Alan, existen varias variaciones de esta placa, comprueba si en realidad es un transistor, en algunos modelos viene un diodo para proteger la palca en caso se conecte al revés la fuente. Este diodo por lo general está cerca a la bornera y del condensador, y por el tamaño es de poca corriente, en tu caso seguramente se quemó porque 12 servos de 15Kg excedieron la corriente que el diodo soporta, Verifica y si es un diodo solo puentea con un cable el diodo, algunos modelos de este módulo no traen ese diodo.MA** 16/03/2018 Responder
Normalmente se coloca un diodo pero estos modulos usan un MOSFET de Alpha & Omega AOD417. Es de 30V 25A.an***** g 29/06/2017 Responder
Hola, una pregunta. Se puede conseguir con esta placa, que los servos se muevan a las ordenes de un teclado. con confirmación alfanumérica del número de servo a mover, de posición de reposo a final de carrera, y vuelta ?Me explico, por ejemplo, pulsar el número uno en el teclado ( o nueve, o 11, etc.), y al apretar el asterisco, que inicie el movimiento.
Luego al repetir la pulsación del mismo número pero al confirmar con almohadilla, que el servo retorne a la posición inicial.
Gracias de antemano.
Jo** 23/04/2019 Responder
Hola AntonioConseguiste tu propósito de manejar ellos servís individualmente por el teclado? Estoy haciendo algo parecido con un teclado midi y estoy interesado en tu Program ;)
Na***** 16/07/2017 Responder
Hola Antonio, la tarjeta del PCA9685 es solo para controlar los servomotores, el que se va a encargar de ejecutar el algoritmo para mover los motores es el arduino y es allí donde tienes que programar de acuerdo a tu necesidad, el PCA9685 va a funcionar independientemente si el arduino se comunicación serial con un celular o la PC o cualquier otro periférico.an**** 19/05/2017 Responder
hola al darle verificar este me marca este error que puedo hacer ayuda:Arduino:1.8.2 (Windows 10), Tarjeta:"Arduino/Genuino Uno"
h:1: error: #include expects "FILENAME" or
#includeÂ
^
h:2: error: #include expects "FILENAME" or
#includeÂ
^
exit status 1
#include expects "FILENAME" or
Este reporte podría tener más información con
"Mostrar salida detallada durante la compilación"
opción habilitada en Archivo -> Preferencias.
Na***** 28/05/2017 Responder
Hola Andrés, verifica que estén bien escritas las dos primeras líneas, para descartar problemas de librería compila los ejemplo que vienen junto con la librería, si estos también tienen errores al verificar, instala nuevamente la librería, instálalo desde el IDE de arduino usando Añadir Librería .ZIPJu*** 06/05/2017 Responder
Cómo se puede conectar dos módulos en un mismo Arduino, quiero controlar 24 servosNa***** 14/05/2017 Responder
Hola Julio, el segundo PCA9685 se conecta en el mismo bus, usa los mismo pines de conexión, pero antes en uno de ellos tienes que cambiar su dirección I2C, para modificar la dirección, necesitas soldar los puentes de la placa cuya dirección quedará definida por: Dirección=0|1|A5|A4|A3|A2|A1|A0. En el programa solo crea un nuevo objeto para el segundo PCA9685, por ejemplo:Adafruit_PWMServoDriver servos2 = Adafruit_PWMServoDriver(dirección2);
jo** ****** 03/02/2017 Responder
Buenashe copiado y he pegado el programa, añadiendo un serial begin para ver como funciona ya que el servo no se movía y cuando llega al comando servos.begin(); la placa deja de funcionar.
lo mismo me pasa con los ejemplos predefinido de la librería.
Na***** 13/02/2017 Responder
Hola José, intenta probar el ejemplo con el servo desconectado, posiblemente sea la fuente de alimentación del servo,Pe*** 09/12/2016 Responder
Conecté todo como se indicó en una Arduino Mega y Uno (oficiales), pero al momento de cargar los ejemplos citados aquí o los ejemplos de las librerías no prenden los servos, solo reaccionan los LEDs y el puerto serial del IDE Arduino. Los servos reaccionan al conectarlos, pero no realizan la tarea del LOOP. Ayuda.Na***** 14/12/2016 Responder
Hola pedro, Podría ser tu fuente o ruido, para descartar eso, solo prueba con un solo servo, si igual no funciona, podría ser que tu módulo PCA9685 tenga otra dirección I2C, si trabajas con el mega no olvides que los pines del I2C son el 20 y 21.ma*** ****ia 06/12/2016 Responder
Que tal buen diagracias por el ejemplo, y si quisiera controlar motores a pasos 28byj-48 se podra?
saludos
gracias
Na***** 14/12/2016 Responder
Hola Marco, Las salidas del PCA9685 son PWM y son solo de control, no tienen suficiente corriente como para mover directamente cargas grandes como un motor. Para el 28byj-48 es mejor usar el ULN2003, o el 2803, este último tienen 8 salidas. Si deseas controlar varios, podrías usar multiplexores o registros con el fin de usar pocos pines desde arduino.Ma**** 07/12/2016 Responder
todo quieres, por que no te pones a investigar por tu cuenta?lu** 10/04/2017 Responder
jvieql2fñ2h6ñlk1ñwhkwkglkokfkpojfowiejiowjgoijgiorgoijrgirjkdpo3e